Устройство гироскоп – Cовтест АТЕ — Современные МЭМС-гироскопы и акселерометры
Гироскоп — это… Что такое Гироскоп?
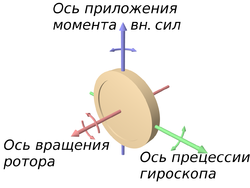
 Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование).
Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование).Гироско́п (от др.-греч. γῦρος «круг» и σκοπέω «смотрю») — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Жаном (Бернаром Леоном) Фуко в его докладе в 1852 году Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».
 Прецессия
ПрецессияИстория
Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852)До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издревле люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Европе были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоганн Боненбергер и опубликовал описание своего изобретения в 1817 году[1]. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства[2]. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе[3]. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас рекомендовал это устройство в учебных целях[6]. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента [7]. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Классификация
Основные типы гироскопов по количеству степеней свободы:
- трехстепенные.
Основные два типа гироскопов по принципу действия:
- механические гироскопы,
- оптические гироскопы.
Механические гироскопы
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
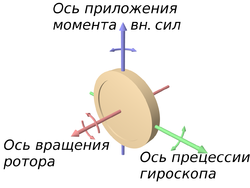
Свойства трехстепенного роторного гироскопа
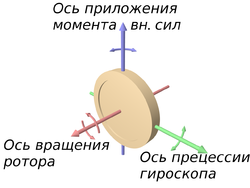 Прецессия механического гироскопа.
Прецессия механического гироскопа.При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.
Это свойство обусловлено возникновением так называемой кориолисовой силы. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок). Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать. Прецессия вызовет кориолисову силу, момент которой скомпенсирует момент внешней силы (гироскопический момент).
Гироскопический эффект вращающихся тел есть проявление коренного свойства материи — её инерционности.
Упрощённо, поведение гироскопа описывается уравнением:
где векторы и являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса, скаляр — его моментом инерции, векторы и угловой скоростью и угловым ускорением.
Отсюда следует, что момент силы , приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный , приводит к движению, перпендикулярному как , так и , то есть к явлению прецессии. Угловая скорость прецессии гироскопа определяется его моментом импульса и моментом приложенной силы[9]:
то есть обратно пропорциональна скорости вращения гироскопа.
Вибрационные гироскопы
Вибрационные гироскопы — устройства, сохраняющие плоскость своих колебаний при повороте основания. Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторным гироскопом. В зарубежной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — так как принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Именно такой тип гироскопов используется в мобильных устройствах, в частности, в iPhone 4 и других.
Принцип работы
Два подвешенных грузика вибрируют на плоскости в MEMS гироскопе с частотой .
При повороте гироскопа возникает Кориолисово ускорение равное , где — скорость и — угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как : , а положение грузика в плоскости — . Внеплоскостное движение , вызываемое поворотом гироскопа равно:
- где:
- — масса колеблющегося грузика.
- — коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.
- — величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
Разновидности
 Гироскоп на МАКС-2009
Гироскоп на МАКС-2009- Пьезоэлектрические гироскопы.
- Твердотельные волновые гироскопы[10][11]. Работа одной из разновидностей ТВГ разработанного компанией Innalabs основана на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и неосесимметричным. При этом, осесимметричная форма резонатора позволяет достичь выдающихся характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость. Резонатор КВГ функционирует в режиме второй формы колебаний. Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают второй режим колебаний. Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления приводит второй режим колебания к нулю. Сила, необходимая для этого, пропорциональна скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закрепленные на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих критичных применений.
- Камертонные гироскопы.
- Вибрационные роторные гироскопы(в том числе динамически настраиваемые гироскопы)[12].
- МЭМС гироскопы[12].
Оптические гироскопы
Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра.Делятся на волоконно-оптические и лазерные гироскопы. Принцип действия основан на эффекте Саньяка, открытом в 1913 году[12][13]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[14]. В то время как в неинерциальной системе она может отличаться от c[15]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре [12]:
где -разность времён прихода лучей, выпущенных в разных направлениях, — площадь контура, — угловая скорость вращения гироскопа. Так как величина очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длинной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный[12]:
где — длина волны.
Применение гироскопов в технике
Схема простейшего механического гироскопа в карданном подвесеСвойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром(маятником), так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп[16].
Системы стабилизации
Системы стабилизации бывают трех основных типов.
- Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
- Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
- Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Новые типы гироскопов

Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В России и США выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.
Перспективным является направление развития квантовых гироскопов.
Перспективы развития гироскопического приборостроения
Сегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники. Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер.
По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации (в пределах зоны покрытия спутниковой навигационной системы (СНС), то есть в пределах планеты). В настоящее время СНС системы по параметрам массы, габаритов и стоимости превосходят гироскопические.
В настоящее время разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы СНС оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе.
В самолётах СНС оказывается точнее ИНС на длинных участках. Но использование двух СНС-приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью СНС также не является достаточно точным. Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной (комплексированной) ИНС/СНС системой.
За последние десятилетия, эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов. Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.
Использование гироскопа в смартфонах и игровых приставках
 iPhone 4 с гироскопом внутри
iPhone 4 с гироскопом внутри  | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
Значительное удешевление производства МЭМС-гироскопов привело к тому, что они начинают использоваться в смартфонах и игровых приставках.
Появление МЭМС-гироскопа[17] в новом смартфоне Apple iPhone 4 открывает новые возможности в 3D-играх и в формировании дополненной реальности[18]. Уже сегодня, разные производители смартфонов и игровых приставок собираются использовать МЭМС-гироскопы в своих продуктах. Вскоре появятся приложения на смартфонах и игровых приставках, которые сделают компьютерный экран окном в другой — виртуальный мир. Например в 3D-игре, пользователь перемещая смартфон или мобильную игровую консоль, увидит другие стороны игровой — виртуальной реальности. Наклоняя смартфон вверх — пользователь увидит виртуальное небо, а наклоняя вниз — виртуальную землю. Вращая по сторонам света — может осмотреться вокруг — внутри виртуального мира. Гироскоп даёт программе данные о том, как ориентирован смартфон относительно реального мира, а программа связывает эти данные с виртуальным миром. Таким же образом, но уже не в игре, можно использовать гироскоп для формирования дополненной реальности.
Также гироскоп стал применяться в управляющих игровых контроллерах, таких как: Sixaxis для Sony PlayStation 3 и Wii MotionPlus для Nintendo Wii. В обоих перечисленных контроллерах использованы два дополняющих друг друга, пространственных сенсора: акселерометр и гироскоп. Впервые игровой контроллер, умеющий определять своё положение в пространстве, был выпущен компанией Nintendo — Wii Remote для игровой приставки Wii, но в нём используется только трёхмерный акселерометр. Трёхмерный акселерометр не способен давать точное измерение параметров вращения при высокодинамичных движениях. И именно поэтому в новейших игровых контроллерах: Sixaxis и Wii MotionPlus, кроме акселерометра, был использован дополнительный пространственный сенсор — гироскоп.
Игрушки на основе гироскопа
Самыми простыми примерами игрушек, сделанных на основе гироскопа, являются йо-йо, волчок (юла) и модели вертолетов.
Волчки отличаются от гироскопов тем, что не имеют ни одной неподвижной точки.
Кроме того, существует спортивный гироскопический тренажёр.
См. также
Примечания
- ↑ Johann G. F. Bohnenberger (1817) «Beschreibung einer Maschine zur Erläuterung der Gesetze der Umdrehung der Erde um ihre Axe, und der Veränderung der Lage der letzteren» («Описание машины для объяснения законов вращения Земли вокруг своей оси и изменения направления последней») Tübinger Blätter für Naturwissenschaften und Arzneikunde, vol. 3, pages 72-83. В интернете: http://www.ion.org/museum/files/File_1.pdf
- ↑ Simeon-Denis Poisson (1813) «Mémoire sur un cas particulier du mouvement de rotation des corps pesans» («Статья об особом случае вращательного движения массивных тел»), Journal de l’École Polytechnique, vol. 9, pages 247—262. В интернете: http://www.ion.org/museum/files/File_2.pdf
- ↑ Фото гироскопа Боненбергера: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
- ↑ Walter R. Johnson (January 1832) «Description of an apparatus called the rotascope for exhibiting several phenomena and illustrating certain laws of rotary motion, » The American Journal of Science and Art, 1st series, vol. 21, no. 2, pages 265—280. В интернете: http://books.google.com/books?id=BjwPAAAAYAAJ&pg=PA265&lpg=PR5&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- ↑ Illustrations of Walter R. Johnson’s gyroscope («rotascope») appear in: Board of Regents, Tenth Annual Report of the Board of Regents of the Smithsonian Institution…. (Washington, D.C.: Cornelius Wendell, 1856), pages 177—178. В интернете: http://books.google.com/books?id=fEyT4sTd7ZkC&pg=PA178&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- ↑ Wagner JF, «The Machine of Bohnenberger, » The Institute of Navigation. В интернете: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
- ↑ L. Foucault (1852) «Sur les phénomènes d’orientation des corps tournants entraînés par un axe fixe à la surface de la terre, » Comptes rendus hebdomadaires des séances de l’Académie des Sciences (Paris), vol. 35, pages 424—427. В интернете: http://www.bookmine.org/memoirs/pendule.html . Scroll down to «Sur les phénomènes d’orientation …»
- ↑ (1) Julius Plücker (September 1853) «Über die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166, no. 9, pages 174—177; (2) Julius Plücker (October 1853) «Noch ein wort über die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166, no. 10, pages 348—351; (3) Charles Wheatstone (1864) «On Fessel’s gyroscope, » Proceedings of the Royal Society of London, vol. 7, pages 43-48. В интернете: http://books.google.com/books?id=CtGEAAAAIAAJ&pg=RA1-PA307&lpg=RA1-PA307&dq=Fessel+gyroscope&source=bl&ots=ZP0mYYrp_d&sig=DGmUeU4MC8hAMuBtDSQn4GpAyWc&hl=en&ei=N4s9SqOaM5vKtgf62vUH&sa=X&oi=book_result&ct=result&resnum=9 .
- ↑ Савельев, 2004, с. 190-197
- ↑ Lynch D.D. HRG Development at Delco, Litton, and Northrop Grumman //Proceedings of Anniversary Workshop on Solid-State Gyroscopy (19-21 May, 2008. Yalta, Ukraine). — Kyiv-Kharkiv. ATS of Ukraine. 2009. — ISBN 978-966-02-5248-6. — ISBN 978-976-02-5248-6 (ошибоч.).
- ↑ Sarapuloff S.A. 15 Years of Solid-State Gyrodynamics Development in the USSR and Ukraine: Results and Perspectives of Applied Theory //Proc. of the National Technical Meeting of US Institute of Navigation (ION) (Santa Monica, Calif., USA. January 14-16,1997). — P.151-164.
- ↑ 1 2 3 4 5 Распопов, 2009, с. 62-64
- ↑ Georges Sagnac. L’ether lumineux demontre par l’effet du vent relatif d’ether dans un interferometre en rotation uniforme, Comptes Rendus 157 (1913), S. 708—710
- ↑ Ландау, Л. Д., Лифшиц, Е. М. Теория поля. — Издание 8-е, стереотипное. — М.: Физматлит, 2006. — 534 с. — («Теоретическая физика», том II). — ISBN 5-9221-0056-4
- ↑ Савельев, 2004, с. 255-256
- ↑ Пельпор, 1988, с. 170-171
- ↑ Статья на сайте deepapple.com: «Тайна чипа AGD1 раскрыта, или Гироскоп iPhone 4 под рентгеном»
- ↑ Форум IT-профессионалов. Статья: «Гироскоп в смартфоне откроет окно в новое измерение»
Литература
- Бороздин В. Н. Гироскопические приборы и устройства систем управления: Учеб. пособие для ВТУЗов., М., Машиностроение, 1990.
- Меркурьев И. В., Подалков В. В. Динамика микромеханического и волнового твердотельного гироскопов. — М.: ФИЗМАТЛИТ, 2009. — 228 с. — ISBN 978-5-9221-1125-6
- Гироскопические системы / Под ред. Д. С. Пельпора. В 3 ч. М.: Высш. шк., 1986—1988. Ч. 1: Теория гироскопов и гироскопических стабилизаторов.1986; Ч. 2: Гироскопические приборы и системы. 1988; Ч. 3: Элементы гироскопических приборов. 1988
- Павловский М. А. Теория гироскопов: Учебник для ВУЗов., Киев, Вища Школа, 1986.
- Сивухин Д. В. Общий курс физики. — Издание 5-е, стереотипное. — М.: Физматлит, 2006. — Т. I. Механика. — 560 с. — ISBN 5-9221-0715-1
- В.В. Матвеев, В.Я. Распопов Основы построение бесплатформенных инерциальных навигационных систем. / Под ред. В.Я. Распопова. — 2-е изд. — СПб.: ЦНИИ «Электроприбор», 2009. — 280 с. — ISBN 978-5-900780-73-3
- Савельев И. В. Курс общей физики:Механика. — М.: Астрель, 2004. — Т. 1. — 336 с. — 5000 экз. — ISBN 5-17-002963-2
- Пельпор Д.С. Гироскопические системы:Гироскопические приборы и системы. — 2-е изд. — М.: Высшая школа, 1988. — Т. 2. — 424 с. — 6000 экз. — ISBN 5-06-001186-0
Кафедры
Российская Федерация
Украина
См. также
Ссылки
Гироскоп — это… Что такое Гироскоп?
 Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование).
Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование).Гироско́п (от др.-греч. γῦρος «круг» и σκοπέω «смотрю») — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Жаном (Бернаром Леоном) Фуко в его докладе в 1852 году Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».
 Прецессия
ПрецессияИстория
Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852)До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издревле люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Европе были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоганн Боненбергер и опубликовал описание своего изобретения в 1817 году[1]. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства[2]. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе[3]. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас рекомендовал это устройство в учебных целях[6]. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента[7]. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Классификация
Основные типы гироскопов по количеству степеней свободы:
- двухстепенные,
- трехстепенные.
Основные два типа гироскопов по принципу действия:
- механические гироскопы,
- оптические гироскопы.
Механические гироскопы
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
Свойства трехстепенного роторного гироскопа
 Прецессия механического гироскопа.
Прецессия механического гироскопа.При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.
Это свойство обусловлено возникновением так называемой кориолисовой силы. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок). Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать. Прецессия вызовет кориолисову силу, момент которой скомпенсирует момент внешней силы (гироскопический момент).
Гироскопический эффект вращающихся тел есть проявление коренного свойства материи — её инерционности.
Упрощённо, поведение гироскопа описывается уравнением:
где векторы и являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса, скаляр — его моментом инерции, векторы и угловой скоростью и угловым ускорением.
Отсюда следует, что момент силы , приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный , приводит к движению, перпендикулярному как , так и , то есть к явлению прецессии. Угловая скорость прецессии гироскопа определяется его моментом импульса и моментом приложенной силы[9]:
то есть обратно пропорциональна скорости вращения гироскопа.
Вибрационные гироскопы
Вибрационные гироскопы — устройства, сохраняющие плоскость своих колебаний при повороте основания. Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторным гироскопом. В зарубежной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — так как принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Например, вибрационные гироскопы применяются в системе измерения наклона электрического самоката Сигвей. Система состоит из пяти вибрационных гироскопов, чьи данные обрабатываются двумя микропроцессорами.
Именно такой тип гироскопов используется в мобильных устройствах, в частности, в iPhone 4 и других.
Принцип работы
Два подвешенных грузика вибрируют на плоскости в MEMS гироскопе с частотой .
При повороте гироскопа возникает Кориолисово ускорение равное , где — скорость и — угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как : , а положение грузика в плоскости — . Внеплоскостное движение , вызываемое поворотом гироскопа равно:
- где:
- — масса колеблющегося грузика.
- — коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.
- — величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
Разновидности
 Гироскоп на МАКС-2009
Гироскоп на МАКС-2009- Пьезоэлектрические гироскопы.
- Твердотельные волновые гироскопы[10][11]. Работа одной из разновидностей ТВГ разработанного компанией Innalabs основана на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и неосесимметричным. При этом, осесимметричная форма резонатора позволяет достичь выдающихся характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость. Резонатор КВГ функционирует в режиме второй формы колебаний. Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают второй режим колебаний. Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления приводит второй режим колебания к нулю. Сила, необходимая для этого, пропорциональна скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закрепленные на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих критичных применений.
- Камертонные гироскопы.
- Вибрационные роторные гироскопы(в том числе динамически настраиваемые гироскопы)[12].
- МЭМС гироскопы[12].
Оптические гироскопы
Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра.Делятся на волоконно-оптические и лазерные гироскопы. Принцип действия основан на эффекте Саньяка, открытом в 1913 году[12][13]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[14]. В то время как в неинерциальной системе она может отличаться от c[15]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре[12]:
где -разность времён прихода лучей, выпущенных в разных направлениях, — площадь контура, — угловая скорость вращения гироскопа. Так как величина очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длинной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный[12]:
где — длина волны.
Применение гироскопов в технике
Схема простейшего механического гироскопа в карданном подвесеСвойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром(маятником), так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп[16].
Системы стабилизации
Системы стабилизации бывают трех основных типов.
- Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
- Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
- Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Новые типы гироскопов

Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В России и США выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.
Перспективным является направление развития квантовых гироскопов.
Перспективы развития гироскопического приборостроения
Сегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники. Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер.
По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации (в пределах зоны покрытия спутниковой навигационной системы (СНС), то есть в пределах планеты). В настоящее время СНС системы по параметрам массы, габаритов и стоимости превосходят гироскопические.
В настоящее время разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы СНС оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе.
В самолётах СНС оказывается точнее ИНС на длинных участках. Но использование двух СНС-приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью СНС также не является достаточно точным. Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной (комплексированной) ИНС/СНС системой.
За последние десятилетия, эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов. Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.
Использование гироскопа в смартфонах и игровых приставках
 iPhone 4 с гироскопом внутри
iPhone 4 с гироскопом внутри  | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
Значительное удешевление производства МЭМС-гироскопов привело к тому, что они начинают использоваться в смартфонах и игровых приставках.
Появление МЭМС-гироскопа[17] в новом смартфоне Apple iPhone 4 открывает новые возможности в 3D-играх и в формировании дополненной реальности[18]. Уже сегодня, разные производители смартфонов и игровых приставок собираются использовать МЭМС-гироскопы в своих продуктах. Вскоре появятся приложения на смартфонах и игровых приставках, которые сделают компьютерный экран окном в другой — виртуальный мир. Например в 3D-игре, пользователь перемещая смартфон или мобильную игровую консоль, увидит другие стороны игровой — виртуальной реальности. Наклоняя смартфон вверх — пользователь увидит виртуальное небо, а наклоняя вниз — виртуальную землю. Вращая по сторонам света — может осмотреться вокруг — внутри виртуального мира. Гироскоп даёт программе данные о том, как ориентирован смартфон относительно реального мира, а программа связывает эти данные с виртуальным миром. Таким же образом, но уже не в игре, можно использовать гироскоп для формирования дополненной реальности.
Также гироскоп стал применяться в управляющих игровых контроллерах, таких как: Sixaxis для Sony PlayStation 3 и Wii MotionPlus для Nintendo Wii. В обоих перечисленных контроллерах использованы два дополняющих друг друга, пространственных сенсора: акселерометр и гироскоп. Впервые игровой контроллер, умеющий определять своё положение в пространстве, был выпущен компанией Nintendo — Wii Remote для игровой приставки Wii, но в нём используется только трёхмерный акселерометр. Трёхмерный акселерометр не способен давать точное измерение параметров вращения при высокодинамичных движениях. И именно поэтому в новейших игровых контроллерах: Sixaxis и Wii MotionPlus, кроме акселерометра, был использован дополнительный пространственный сенсор — гироскоп.
Игрушки на основе гироскопа
Самыми простыми примерами игрушек, сделанных на основе гироскопа, являются йо-йо, волчок (юла) и модели вертолетов.
Волчки отличаются от гироскопов тем, что не имеют ни одной неподвижной точки.
Кроме того, существует спортивный гироскопический тренажёр.
См. также
Примечания
- ↑ Johann G. F. Bohnenberger (1817) «Beschreibung einer Maschine zur Erläuterung der Gesetze der Umdrehung der Erde um ihre Axe, und der Veränderung der Lage der letzteren» («Описание машины для объяснения законов вращения Земли вокруг своей оси и изменения направления последней») Tübinger Blätter für Naturwissenschaften und Arzneikunde, vol. 3, pages 72-83. В интернете: http://www.ion.org/museum/files/File_1.pdf
- ↑ Simeon-Denis Poisson (1813) «Mémoire sur un cas particulier du mouvement de rotation des corps pesans» («Статья об особом случае вращательного движения массивных тел»), Journal de l’École Polytechnique, vol. 9, pages 247—262. В интернете: http://www.ion.org/museum/files/File_2.pdf
- ↑ Фото гироскопа Боненбергера: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
- ↑ Walter R. Johnson (January 1832) «Description of an apparatus called the rotascope for exhibiting several phenomena and illustrating certain laws of rotary motion, » The American Journal of Science and Art, 1st series, vol. 21, no. 2, pages 265—280. В интернете: http://books.google.com/books?id=BjwPAAAAYAAJ&pg=PA265&lpg=PR5&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- ↑ Illustrations of Walter R. Johnson’s gyroscope («rotascope») appear in: Board of Regents, Tenth Annual Report of the Board of Regents of the Smithsonian Institution…. (Washington, D.C.: Cornelius Wendell, 1856), pages 177—178. В интернете: http://books.google.com/books?id=fEyT4sTd7ZkC&pg=PA178&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- ↑ Wagner JF, «The Machine of Bohnenberger, » The Institute of Navigation. В интернете: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
- ↑ L. Foucault (1852) «Sur les phénomènes d’orientation des corps tournants entraînés par un axe fixe à la surface de la terre, » Comptes rendus hebdomadaires des séances de l’Académie des Sciences (Paris), vol. 35, pages 424—427. В интернете: http://www.bookmine.org/memoirs/pendule.html . Scroll down to «Sur les phénomènes d’orientation …»
- ↑ (1) Julius Plücker (September 1853) «Über die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166, no. 9, pages 174—177; (2) Julius Plücker (October 1853) «Noch ein wort über die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166, no. 10, pages 348—351; (3) Charles Wheatstone (1864) «On Fessel’s gyroscope, » Proceedings of the Royal Society of London, vol. 7, pages 43-48. В интернете: http://books.google.com/books?id=CtGEAAAAIAAJ&pg=RA1-PA307&lpg=RA1-PA307&dq=Fessel+gyroscope&source=bl&ots=ZP0mYYrp_d&sig=DGmUeU4MC8hAMuBtDSQn4GpAyWc&hl=en&ei=N4s9SqOaM5vKtgf62vUH&sa=X&oi=book_result&ct=result&resnum=9 .
- ↑ Савельев, 2004, с. 190-197
- ↑ Lynch D.D. HRG Development at Delco, Litton, and Northrop Grumman //Proceedings of Anniversary Workshop on Solid-State Gyroscopy (19-21 May, 2008. Yalta, Ukraine). — Kyiv-Kharkiv. ATS of Ukraine. 2009. — ISBN 978-966-02-5248-6. — ISBN 978-976-02-5248-6 (ошибоч.).
- ↑ Sarapuloff S.A. 15 Years of Solid-State Gyrodynamics Development in the USSR and Ukraine: Results and Perspectives of Applied Theory //Proc. of the National Technical Meeting of US Institute of Navigation (ION) (Santa Monica, Calif., USA. January 14-16,1997). — P.151-164.
- ↑ 1 2 3 4 5 Распопов, 2009, с. 62-64
- ↑ Georges Sagnac. L’ether lumineux demontre par l’effet du vent relatif d’ether dans un interferometre en rotation uniforme, Comptes Rendus 157 (1913), S. 708—710
- ↑ Ландау, Л. Д., Лифшиц, Е. М. Теория поля. — Издание 8-е, стереотипное. — М.: Физматлит, 2006. — 534 с. — («Теоретическая физика», том II). — ISBN 5-9221-0056-4
- ↑ Савельев, 2004, с. 255-256
- ↑ Пельпор, 1988, с. 170-171
- ↑ Статья на сайте deepapple.com: «Тайна чипа AGD1 раскрыта, или Гироскоп iPhone 4 под рентгеном»
- ↑ Форум IT-профессионалов. Статья: «Гироскоп в смартфоне откроет окно в новое измерение»
Литература
- Бороздин В. Н. Гироскопические приборы и устройства систем управления: Учеб. пособие для ВТУЗов., М., Машиностроение, 1990.
- Меркурьев И. В., Подалков В. В. Динамика микромеханического и волнового твердотельного гироскопов. — М.: ФИЗМАТЛИТ, 2009. — 228 с. — ISBN 978-5-9221-1125-6
- Гироскопические системы / Под ред. Д. С. Пельпора. В 3 ч. М.: Высш. шк., 1986—1988. Ч. 1: Теория гироскопов и гироскопических стабилизаторов.1986; Ч. 2: Гироскопические приборы и системы. 1988; Ч. 3: Элементы гироскопических приборов. 1988
- Павловский М. А. Теория гироскопов: Учебник для ВУЗов., Киев, Вища Школа, 1986.
- Сивухин Д. В. Общий курс физики. — Издание 5-е, стереотипное. — М.: Физматлит, 2006. — Т. I. Механика. — 560 с. — ISBN 5-9221-0715-1
- В.В. Матвеев, В.Я. Распопов Основы построение бесплатформенных инерциальных навигационных систем. / Под ред. В.Я. Распопова. — 2-е изд. — СПб.: ЦНИИ «Электроприбор», 2009. — 280 с. — ISBN 978-5-900780-73-3
- Савельев И. В. Курс общей физики:Механика. — М.: Астрель, 2004. — Т. 1. — 336 с. — 5000 экз. — ISBN 5-17-002963-2
- Пельпор Д.С. Гироскопические системы:Гироскопические приборы и системы. — 2-е изд. — М.: Высшая школа, 1988. — Т. 2. — 424 с. — 6000 экз. — ISBN 5-06-001186-0
Кафедры
Российская Федерация
Украина
См. также
Ссылки
Гироскоп — это… Что такое Гироскоп?
 Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование).
Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование).Гироско́п (от др.-греч. γῦρος «круг» и σκοπέω «смотрю») — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Жаном (Бернаром Леоном) Фуко в его докладе в 1852 году Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».
 Прецессия
ПрецессияИстория
Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852)До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издревле люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Европе были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоганн Боненбергер и опубликовал описание своего изобретения в 1817 году[1]. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства[2]. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе[3]. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас рекомендовал это устройство в учебных целях[6]. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента[7]. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Классификация
Основные типы гироскопов по количеству степеней свободы:
- двухстепенные,
- трехстепенные.
Основные два типа гироскопов по принципу действия:
- механические гироскопы,
- оптические гироскопы.
Механические гироскопы
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
Свойства трехстепенного роторного гироскопа
 Прецессия механического гироскопа.
Прецессия механического гироскопа.При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.
Это свойство обусловлено возникновением так называемой кориолисовой силы. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок). Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать. Прецессия вызовет кориолисову силу, момент которой скомпенсирует момент внешней силы (гироскопический момент).
Гироскопический эффект вращающихся тел есть проявление коренного свойства материи — её инерционности.
Упрощённо, поведение гироскопа описывается уравнением:
где векторы и являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса, скаляр — его моментом инерции, векторы и угловой скоростью и угловым ускорением.
Отсюда следует, что момент силы , приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный , приводит к движению, перпендикулярному как , так и , то есть к явлению прецессии. Угловая скорость прецессии гироскопа определяется его моментом импульса и моментом приложенной силы[9]:
то есть обратно пропорциональна скорости вращения гироскопа.
Вибрационные гироскопы
Вибрационные гироскопы — устройства, сохраняющие плоскость своих колебаний при повороте основания. Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторным гироскопом. В зарубежной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — так как принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Например, вибрационные гироскопы применяются в системе измерения наклона электрического самоката Сигвей. Система состоит из пяти вибрационных гироскопов, чьи данные обрабатываются двумя микропроцессорами.
Именно такой тип гироскопов используется в мобильных устройствах, в частности, в iPhone 4 и других.
Принцип работы
Два подвешенных грузика вибрируют на плоскости в MEMS гироскопе с частотой .
При повороте гироскопа возникает Кориолисово ускорение равное , где — скорость и — угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как : , а положение грузика в плоскости — . Внеплоскостное движение , вызываемое поворотом гироскопа равно:
- где:
- — масса колеблющегося грузика.
- — коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.
- — величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
Разновидности
 Гироскоп на МАКС-2009
Гироскоп на МАКС-2009- Пьезоэлектрические гироскопы.
- Твердотельные волновые гироскопы[10][11]. Работа одной из разновидностей ТВГ разработанного компанией Innalabs основана на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и неосесимметричным. При этом, осесимметричная форма резонатора позволяет достичь выдающихся характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость. Резонатор КВГ функционирует в режиме второй формы колебаний. Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают второй режим колебаний. Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления приводит второй режим колебания к нулю. Сила, необходимая для этого, пропорциональна скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закрепленные на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих критичных применений.
- Камертонные гироскопы.
- Вибрационные роторные гироскопы(в том числе динамически настраиваемые гироскопы)[12].
- МЭМС гироскопы[12].
Оптические гироскопы
Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра.Делятся на волоконно-оптические и лазерные гироскопы. Принцип действия основан на эффекте Саньяка, открытом в 1913 году[12][13]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[14]. В то время как в неинерциальной системе она может отличаться от c[15]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре[12]:
где -разность времён прихода лучей, выпущенных в разных направлениях, — площадь контура, — угловая скорость вращения гироскопа. Так как величина очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длинной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный[12]:
где — длина волны.
Применение гироскопов в технике
Схема простейшего механического гироскопа в карданном подвесеСвойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром(маятником), так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп[16].
Системы стабилизации
Системы стабилизации бывают трех основных типов.
- Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
- Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
- Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Новые типы гироскопов

Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В России и США выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.
Перспективным является направление развития квантовых гироскопов.
Перспективы развития гироскопического приборостроения
Сегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники. Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер.
По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации (в пределах зоны покрытия спутниковой навигационной системы (СНС), то есть в пределах планеты). В настоящее время СНС системы по параметрам массы, габаритов и стоимости превосходят гироскопические.
В настоящее время разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы СНС оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе.
В самолётах СНС оказывается точнее ИНС на длинных участках. Но использование двух СНС-приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью СНС также не является достаточно точным. Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной (комплексированной) ИНС/СНС системой.
За последние десятилетия, эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов. Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.
Использование гироскопа в смартфонах и игровых приставках
 iPhone 4 с гироскопом внутри
iPhone 4 с гироскопом внутри  | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
Значительное удешевление производства МЭМС-гироскопов привело к тому, что они начинают использоваться в смартфонах и игровых приставках.
Появление МЭМС-гироскопа[17] в новом смартфоне Apple iPhone 4 открывает новые возможности в 3D-играх и в формировании дополненной реальности[18]. Уже сегодня, разные производители смартфонов и игровых приставок собираются использовать МЭМС-гироскопы в своих продуктах. Вскоре появятся приложения на смартфонах и игровых приставках, которые сделают компьютерный экран окном в другой — виртуальный мир. Например в 3D-игре, пользователь перемещая смартфон или мобильную игровую консоль, увидит другие стороны игровой — виртуальной реальности. Наклоняя смартфон вверх — пользователь увидит виртуальное небо, а наклоняя вниз — виртуальную землю. Вращая по сторонам света — может осмотреться вокруг — внутри виртуального мира. Гироскоп даёт программе данные о том, как ориентирован смартфон относительно реального мира, а программа связывает эти данные с виртуальным миром. Таким же образом, но уже не в игре, можно использовать гироскоп для формирования дополненной реальности.
Также гироскоп стал применяться в управляющих игровых контроллерах, таких как: Sixaxis для Sony PlayStation 3 и Wii MotionPlus для Nintendo Wii. В обоих перечисленных контроллерах использованы два дополняющих друг друга, пространственных сенсора: акселерометр и гироскоп. Впервые игровой контроллер, умеющий определять своё положение в пространстве, был выпущен компанией Nintendo — Wii Remote для игровой приставки Wii, но в нём используется только трёхмерный акселерометр. Трёхмерный акселерометр не способен давать точное измерение параметров вращения при высокодинамичных движениях. И именно поэтому в новейших игровых контроллерах: Sixaxis и Wii MotionPlus, кроме акселерометра, был использован дополнительный пространственный сенсор — гироскоп.
Игрушки на основе гироскопа
Самыми простыми примерами игрушек, сделанных на основе гироскопа, являются йо-йо, волчок (юла) и модели вертолетов.
Волчки отличаются от гироскопов тем, что не имеют ни одной неподвижной точки.
Кроме того, существует спортивный гироскопический тренажёр.
См. также
Примечания
- ↑ Johann G. F. Bohnenberger (1817) «Beschreibung einer Maschine zur Erläuterung der Gesetze der Umdrehung der Erde um ihre Axe, und der Veränderung der Lage der letzteren» («Описание машины для объяснения законов вращения Земли вокруг своей оси и изменения направления последней») Tübinger Blätter für Naturwissenschaften und Arzneikunde, vol. 3, pages 72-83. В интернете: http://www.ion.org/museum/files/File_1.pdf
- ↑ Simeon-Denis Poisson (1813) «Mémoire sur un cas particulier du mouvement de rotation des corps pesans» («Статья об особом случае вращательного движения массивных тел»), Journal de l’École Polytechnique, vol. 9, pages 247—262. В интернете: http://www.ion.org/museum/files/File_2.pdf
- ↑ Фото гироскопа Боненбергера: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
- ↑ Walter R. Johnson (January 1832) «Description of an apparatus called the rotascope for exhibiting several phenomena and illustrating certain laws of rotary motion, » The American Journal of Science and Art, 1st series, vol. 21, no. 2, pages 265—280. В интернете: http://books.google.com/books?id=BjwPAAAAYAAJ&pg=PA265&lpg=PR5&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- ↑ Illustrations of Walter R. Johnson’s gyroscope («rotascope») appear in: Board of Regents, Tenth Annual Report of the Board of Regents of the Smithsonian Institution…. (Washington, D.C.: Cornelius Wendell, 1856), pages 177—178. В интернете: http://books.google.com/books?id=fEyT4sTd7ZkC&pg=PA178&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- ↑ Wagner JF, «The Machine of Bohnenberger, » The Institute of Navigation. В интернете: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
- ↑ L. Foucault (1852) «Sur les phénomènes d’orientation des corps tournants entraînés par un axe fixe à la surface de la terre, » Comptes rendus hebdomadaires des séances de l’Académie des Sciences (Paris), vol. 35, pages 424—427. В интернете: http://www.bookmine.org/memoirs/pendule.html . Scroll down to «Sur les phénomènes d’orientation …»
- ↑ (1) Julius Plücker (September 1853) «Über die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166, no. 9, pages 174—177; (2) Julius Plücker (October 1853) «Noch ein wort über die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166, no. 10, pages 348—351; (3) Charles Wheatstone (1864) «On Fessel’s gyroscope, » Proceedings of the Royal Society of London, vol. 7, pages 43-48. В интернете: http://books.google.com/books?id=CtGEAAAAIAAJ&pg=RA1-PA307&lpg=RA1-PA307&dq=Fessel+gyroscope&source=bl&ots=ZP0mYYrp_d&sig=DGmUeU4MC8hAMuBtDSQn4GpAyWc&hl=en&ei=N4s9SqOaM5vKtgf62vUH&sa=X&oi=book_result&ct=result&resnum=9 .
- ↑ Савельев, 2004, с. 190-197
- ↑ Lynch D.D. HRG Development at Delco, Litton, and Northrop Grumman //Proceedings of Anniversary Workshop on Solid-State Gyroscopy (19-21 May, 2008. Yalta, Ukraine). — Kyiv-Kharkiv. ATS of Ukraine. 2009. — ISBN 978-966-02-5248-6. — ISBN 978-976-02-5248-6 (ошибоч.).
- ↑ Sarapuloff S.A. 15 Years of Solid-State Gyrodynamics Development in the USSR and Ukraine: Results and Perspectives of Applied Theory //Proc. of the National Technical Meeting of US Institute of Navigation (ION) (Santa Monica, Calif., USA. January 14-16,1997). — P.151-164.
- ↑ 1 2 3 4 5 Распопов, 2009, с. 62-64
- ↑ Georges Sagnac. L’ether lumineux demontre par l’effet du vent relatif d’ether dans un interferometre en rotation uniforme, Comptes Rendus 157 (1913), S. 708—710
- ↑ Ландау, Л. Д., Лифшиц, Е. М. Теория поля. — Издание 8-е, стереотипное. — М.: Физматлит, 2006. — 534 с. — («Теоретическая физика», том II). — ISBN 5-9221-0056-4
- ↑ Савельев, 2004, с. 255-256
- ↑ Пельпор, 1988, с. 170-171
- ↑ Статья на сайте deepapple.com: «Тайна чипа AGD1 раскрыта, или Гироскоп iPhone 4 под рентгеном»
- ↑ Форум IT-профессионалов. Статья: «Гироскоп в смартфоне откроет окно в новое измерение»
Литература
- Бороздин В. Н. Гироскопические приборы и устройства систем управления: Учеб. пособие для ВТУЗов., М., Машиностроение, 1990.
- Меркурьев И. В., Подалков В. В. Динамика микромеханического и волнового твердотельного гироскопов. — М.: ФИЗМАТЛИТ, 2009. — 228 с. — ISBN 978-5-9221-1125-6
- Гироскопические системы / Под ред. Д. С. Пельпора. В 3 ч. М.: Высш. шк., 1986—1988. Ч. 1: Теория гироскопов и гироскопических стабилизаторов.1986; Ч. 2: Гироскопические приборы и системы. 1988; Ч. 3: Элементы гироскопических приборов. 1988
- Павловский М. А. Теория гироскопов: Учебник для ВУЗов., Киев, Вища Школа, 1986.
- Сивухин Д. В. Общий курс физики. — Издание 5-е, стереотипное. — М.: Физматлит, 2006. — Т. I. Механика. — 560 с. — ISBN 5-9221-0715-1
- В.В. Матвеев, В.Я. Распопов Основы построение бесплатформенных инерциальных навигационных систем. / Под ред. В.Я. Распопова. — 2-е изд. — СПб.: ЦНИИ «Электроприбор», 2009. — 280 с. — ISBN 978-5-900780-73-3
- Савельев И. В. Курс общей физики:Механика. — М.: Астрель, 2004. — Т. 1. — 336 с. — 5000 экз. — ISBN 5-17-002963-2
- Пельпор Д.С. Гироскопические системы:Гироскопические приборы и системы. — 2-е изд. — М.: Высшая школа, 1988. — Т. 2. — 424 с. — 6000 экз. — ISBN 5-06-001186-0
Кафедры
Российская Федерация
Украина
См. также
Ссылки
Гирокомпас — Википедия
Гиросфера гирокомпаса типа Аншютц — Кемпфе в разрезеГироко́мпас (в морском профессиональном жаргоне — гирокомпа́с) — механический указатель направления истинного (географического) меридиана, предназначенный для определения курса объекта, а также азимута (пеленга) ориентируемого направления. Принцип действия гирокомпаса основан на использовании свойств гироскопа и суточного вращения Земли. Его идея была предложена французским учёным Фуко.
Гирокомпасы широко применяются в морской навигации и ракетной технике. Они имеют два важных преимущества перед магнитными компасами:
Гирокомпас — это, по существу, гироскоп, то есть вращающееся колесо (ротор), установленное в кардановом подвесе, который обеспечивает оси ротора свободную ориентацию в пространстве.
Предположим, ротор начал вращаться вокруг своей оси, направление которой отлично от земной оси. В силу закона сохранения момента импульса, ротор будет сохранять свою ориентацию в пространстве. Поскольку Земля вращается, неподвижный относительно Земли наблюдатель видит, что ось гироскопа делает оборот за 24 часа. Такой вращающийся гироскоп сам по себе не является навигационным средством. Для возникновения прецессии ротор удерживают в плоскости горизонта, например, с помощью груза, удерживающего ось ротора в горизонтальном положении по отношению к земной поверхности. В этом случае сила тяжести будет создавать крутящий момент, и ось ротора будет поворачиваться на истинный север. Поскольку груз удерживает ось ротора в горизонтальном положении по отношению к земной поверхности, ось никогда не может совпадать с осью вращения Земли, только на экваторе они будут параллельны.
Гироскоп был запатентован в 1885 году датчанином Мариусом Герардусом ван ден Босом, но его гироскоп никогда должным образом не работал.[1] Француз Артур Кребсruen в 1889 году сконструировал маятниковый гирокомпас для экспериментов на подводной лодке «Gymnote»ruen. Это позволило Gymnote в 1890 году преодолеть морскую блокаду, проплыв под килем броненосца, оставшись незамеченной.[2] В 1903 году немец Герман Аншютц-Кемпфе сконструировал работающий гирокомпас и получил патент на его изобретение[3]. В 1908 году Аншютц-Кемпфе и американский изобретатель Элмер Сперри патентуют гироскоп в Германии и США соответственно. Когда Сперри попытался продать своё устройство германскому военно-морскому флоту, Аншютц-Кемпфе подал в суд иск за нарушение патентного законодательства. Сперри утверждал, что патент Аншютц-Кемпфе недействителен, так как патентуемое устройство незначительно отличается от гироскопа ван ден Боса. Патентным экспертом по иску выступал знаменитый физик Альберт Эйнштейн. Сначала он согласился со Сперри, но затем изменил своё мнение, признав, что патент Аншютц-Кемпфе был действителен, а Сперри нарушил авторское право, использовав специфический способ затухания. Аншютц-Кемпфе выиграл процесс в 1915 году.
Практическая реализация гирокомпаса[править | править код]
Морской гирокомпас обычно основывается на гиросфере. Гиросфера — полый металлический шар, внутри которого имеются вращающиеся с высокой скоростью гироскопы. Привод вращения — электродвигатели. Сфера герметична, заполнена водородом для уменьшения потерь на трение, содержит на дне небольшое количество смазывающего масла. Для запитки электродвигателя сферы выполняются составными с токоизолирующим бандажом между частями, питающее напряжение (обычно переменное высокой частоты) подаётся через токопроводящую жидкость, состоящую из воды, глицерина, этилового спирта и борной кислоты, в которой плавает сфера.
Существует два способа предотвращения контакта сферы с дном или крышкой сосуда, в обоих случаях они основаны на применении ртути как жидкости с высокой плотностью, нерастворимой в воде.
В первом случае небольшое количество, около 50 мл, ртути выливается на дно сосуда, а сфера изготавливается с небольшой отрицательной плавучестью и тонет в спецжидкости до тех пор, пока не достигает слоя ртути, ниже которого уже не тонет из-за большого веса вытесняемой ртути.
Во втором варианте сфера имеет положительную плавучесть и коническое углубление наверху, в которое опять же наливается ртуть, и входит конический выступ крышки сосуда.
На советских и российских гирокомпасах применяется первый способ, жидкость подлежит замене не реже, чем раз в полгода из-за ухудшения её свойств. В некоторых современных гирокомпасах применяется динамическое удержание гиросферы в струе поддерживающей жидкости, непрерывно прокачиваемой насосом снизу вверх. В этом случае ртутной подушки нет, такие гирокомпасы дешевле, проще в обслуживании и безопаснее.
Гирокомпас может создавать ошибки измерения. Например, резкое изменение курса, скорости или широты могут вызывать девиацию, которая будет существовать до тех пор, пока гироскоп не отработает такое изменение. На большинстве современных судов имеются системы спутниковой навигации (типа GPS) и (или) другие навигационные средства, которые передают во встроенный компьютер гирокомпаса поправки.
Электронный гироскоп
Изобретение относится к области измерительной техники и может быть использовано в приборостроении и машиностроении для измерения угловой скорости. Гироскоп содержит пластину пьезоэлектрика, на которую нанесены встречно-штыревые преобразователи (ВШП), отражающие структуры драйвера поверхностных акустических волн, а также электроды чувствительного элемента разности потенциалов, размещенные попарно за пределами ВШП на расстояниях, не меньших половины периода стоячих поверхностных акустических волн, и параллельно направлению распространения поверхностных акустических волн, по одному электроду каждой пары у одного из противоположных краев пластины пьезоэлектрика. Электроды, которые находятся ближе к одному и тому же краю пластины пьезоэлектрика, электрически соединены под слоем поглотителя акустических колебаний с одной и той же контактной шиной, а находящиеся в одной паре электроды размещены вдоль одной и той же пучности стоячей поверхностной акустической волны, но ближе к противоположным краям пластины пьезоэлектрика. Контактные шины могут быть размещены на ребрах жесткости, находящихся на краях пластины пьезоэлектрика и параллельных основному направлению распространения поверхностных акустических волн. Техническим результатом является повышение точности измерения угловой скорости. 1 з.п. ф-лы, 1 ил.
Изобретение относится к области приборостроения, а именно к приборам ориентации, навигации и систем управления подвижными объектами, и предназначено для измерения угловой скорости в этих системах.
Известные волоконно-оптические гироскопы и лазерные гироскопы широко используются в инерциальной навигации и в системах наведения. Преимуществом этих гироскопов является достаточно высокая точность. Недостатком этих гироскопов является достаточно высокая стоимость и относительно большие габариты. К областям применения, требующим гироскопов менее дорогих и меньшего размера, относятся: системы автомобильной безопасности (системы против скольжения, системы камер), потребительские товары (видеокамеры, GPS, спортивное оборудование), промышленные товары (роботы, управление оборудованием), медицинские изделия (хирургические инструменты) [Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах / XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005. С.275-283].
Известны микромеханические гироскопы на основе кремния [Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах / XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005. С.275-283]. Такие гироскопы представляют собой пластину, закрепленную на торсионах и совершающую вынужденные колебания на собственной резонансной частоте. Гироскоп приводится в колебательное движение путем подачи сигнала на драйвер (как правило, электростатический). При внешнем вращении микромеханического гироскопа возникает сила Кориолиса, создающая колебания относительно измерительной оси. При этом зазор между подвижной массой микромеханического гироскопа и основанием изменяется, что приводит к изменению расстояния между электродами и соответствующей емкости. Измеряя изменение величины емкости, можно определить изменение угловой скорости вращения микромеханического гироскопа.
Однако вышеуказанные гироскопы имеют низкую точность и низкую механическую прочность.
Известен также Виброгироскоп (патент РФ №2123219, H01L 41/08, 1998.12.10.), содержащий твердотельный элемент из сегнетоэлектрической керамики с размытым фазовым переходом, в виде монолитного стержня с крестообразным поперечным сечением, с двумя парами сплошных и двумя парами встречно-штыревых электродов. Сплошные электроды соединены параллельно и подключены к выходу первого генератора. Встречно-штыревые электроды подключены к частотно-задающим цепям второго и третьего генераторов. Выходы второго и третьего генераторов подключены к входам смесителя, выход которого подключен к входу детектора, а выход детектора подключен к входу индикатора.
Стабильность и помехоустойчивость позволяют применять виброгироскоп в компактных системах навигации и автоматического управления подвижными объектами.
Однако виброгироскоп имеет ограничения по рабочим характеристикам из-за принципа действия, который основан на вибрации подвешенных механических структур. Кроме того, эта подвешенная механическая структура очень чувствительна к внешним ударам и вибрации, т.к. она не может быть жестко присоединена к подложке из-за резонансной вибрации. Это ограничивает диапазон его применения.
Наиболее близким по технической сущности к изобретению является гироскоп [Патент US №6,516,665. «Микро-электро-механический гироскоп»/ Varadan V.K., Pascal B., Xavier, William D. Suh, Jose A. Kollakompil, Vasundara V. Varandan. 2003].
Микро-электро-механический гироскоп включает в себя пластину пьезоэлектрика, на которую нанесены встречно-штыревые преобразователи (ВШП) драйвера поверхностных акустических волн (ПАВ), ВШП чувствительного элемента колебаний ПАВ и отражающие структуры, расположенные за пределами встречно-штыревых преобразователей.
Принцип действия микро-электро-механического гироскопа основан на использовании поверхностной акустической волны, распространяющейся по пьезоэлектрической подложке. В отличие от других, этот гироскоп имеет планарную конфигурацию без подвешенных резонансных механических структур, вследствие чего является устойчивым и ударопрочным.
Недостатком микро-электро-механического гироскопа является низкая точность и соответственно невозможность использования его для высокоточных применений вследствие того, что электроды ВШП чувствительного элемента колебаний ПАВ неизбирательно воспринимают изменения пьезоэлектрических потенциалов, возникающие при действии разнонаправленных сил Кориолиса, соответствующих разнонаправленным движениям частиц пьезоэлектрической пластины, участвующих в формировании ПАВ. Вышеизложенные факты приводят к снижению чувствительности и точности оценивания угловой скорости, что и является недостатками прототипа.
Задачей настоящего изобретения является повышение чувствительности и точности при измерениях угловой скорости вращения с использованием пьезоэлектрических устройств.
Техническим результатом является повышение точности и чувствительности измерений.
Технический результат достигается тем, что в электронном гироскопе, содержащем пьезопластину, на которую нанесены встречно-штыревые преобразователи и отражающие структуры драйвера поверхностных акустических волн, согласно изобретению за пределами встречно-штыревых преобразователей драйвера поверхностных акустических волн параллельно направлению распространения поверхностных акустических волн дополнительно попарно, на расстояниях, между двумя соседними парами электродов, не меньших половины периода поверхностных акустических волн, размещены электроды чувствительного элемента разности потенциалов, по одному электроду каждой пары у одного из противоположных краев пьезопластины, причем те из электродов каждой пары, которые находятся ближе к одному и тому же краю пьезопластины, электрически соединены под слоем поглотителя акустических колебаний с одной и той же контактной шиной, а находящиеся в одной паре электроды размещены один напротив другого, но ближе к противоположным краям пьезопластины, выполненной из пьезоэлектрика или пьезополупроводника.
Драйвер поверхностных акустических волн создает поверхностные акустические волны на поверхности пьезопластины, что является первичным вибрационным перемещением для этого гироскопа. Силы Кориолиса и первичные поверхностные акустические волны определяют вторичное вибрационное перемещение (вторичные поверхностные акустические волны) в направлении, ортогональном к направлению первичных поверхностных акустических волн. При этом силы Кориолиса, возникающие при наличии внешнего вращения основания гироскопа и приложенные к частицам пьезоэлектрика или пьезополупроводника, движущимся в одном направлении, противоположны по направлению силам Кориолиса, приложенным к другим частицам пьезоэлектрика или пьезополупроводника, в тот же момент времени на соседнем участке поверхностных акустических волн, движущимся в противоположном направлении.
В отличие от прототипа в электронном гироскопе измеряется не разность потенциалов, создаваемая под действием одновременно разнонаправленных сил Кориолиса всеми пучностями стоячей первичной ПАВ на электродах чувствительного элемента вторичной поверхностной акустической волны, а разность потенциалов, образованная под действием эффекта увлечения частиц пьезоэлектрика или пьезополупроводника одновременно однонаправленными силами Кориолиса, то есть при движении частиц пьезоэлектрика только вдоль тех участков первичной поверхностной акустической волны, которые находятся на расстояниях, кратных периоду поверхностных акустических волн, что позволяет повысить показатели чувствительности и точности при измерении угловой скорости пьезопластины.
Другим отличием от прототипа является то, что расстояния между электродами одной пары электродов чувствительного элемента разности потенциалов, образующими одну пару, примерно равны апертуре драйвера первичных поверхностных акустических волн, а не как у прототипа, у которого расстояния между электродами одной пары электродов встречно-штыревого преобразователя чувствительного элемента вторичной поверхностной акустической волны соответствуют четверти длины волны вторичной поверхностной акустической волны в той ее части, которая распространяется за пределами апертуры встречно-штыревого преобразователя драйвера первичных поверхностных акустических волн.
Технический результат достигается за счет того, что разности потенциалов вдоль одного из участков первичной поверхностной акустической волны образуются в некоторые моменты времени только под действием однонаправленных сил Кориолиса, что обеспечивает увеличение амплитуды совокупной разности потенциалов на контактных шинах и, тем самым, повышение точности и чувствительности измерений по сравнению с прототипом.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленного устройства, отсутствуют, следовательно, заявленное изобретение соответствует условию «новизна».
В настоящее время автору не известны гироскопы, которые имели бы такую высокую чувствительность и динамический диапазон, подходящий для многих промышленных применений, которые обеспечивает предлагаемая конструкция гироскопа.
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата, следовательно, заявленное изобретение соответствует «изобретательскому уровню».
Сущность изобретения поясняется чертежом, где представлена схема электронного гироскопа.
Электронный гироскоп состоит из основания и выполненных на нем встречно-штыревых преобразователей и отражающих структур.
Основанием электронного гироскопа на ПАВ служит прямоугольная пьезопластина 1, выполненная из пьезоэлектрика или пьезополупроводника, например из кварца, ниобата лития или из CdS, CdSe, слоистой структуры LiNbO3 — Si соответственно [1].
На двух противоположных краях поверхности прямоугольной пьезопластины 1 в направлении распространения первичной ПАВ сформированы отражающие структуры 4 и ВШП 5 драйвера ПАВ, а в ортогональном направлении по обе стороны от апертуры драйвера ПАВ вдоль направления распространения первичной ПАВ сформированы электроды чувствительного элемента разности потенциалов 6, поглотители акустических колебаний 3 с контактными шинами 2 в соответствующей последовательности.
Отражающие структуры 4 расположены за ВШП 5 драйвера ПАВ, а электроды чувствительного элемента разности потенциалов 6, поглотители акустических колебаний 3 и контактные шины 2 — между другими двумя противоположными краями пьезопластины 1 вдоль направления распространения первичной ПАВ. Поглотители акустических колебаний 3 выполняют функции поглощения ПАВ так, чтобы поверхность пьезопластины 1 за поглотителями акустических колебаний была нечувствительной к ПАВ, создаваемым ВШП 5 драйвера ПАВ, что позволяет аккумулировать на одной контактной шине потенциалы, одновременно сформированные на электродах чувствительного элемента разности потенциалов 6 под действием сил Кориолиса одного направления.
Устройство работает следующим образом. На ВШП 5 драйвера ПАВ от внешнего генератора (не показан) подается электрический сигнал с заданной частотой. Если пьезопластина 1 выполнена из ниобата лития, то электрический сигнал может иметь частоту около 1 ГГц.
Первичные ПАВ создаются на пьезопластине 1 встречно-штыревыми преобразователями 5 драйвера ПАВ и отражающими структурами 4. Поверхностные акустические волны распространяются по пьезопластине 1 в области, ограниченной поглотителями акустических колебаний 3. Распространяясь дальше, первичная ПАВ взаимодействует с отражающими структурами 4.
При появлении внешнего вращения основания гироскопа к вибрирующим заряженным частицам материала пластины пьезоэлектрика 1 прикладываются силы Кориолиса. Напряжение на контактных шинах обусловлено поперечным акустоэлектрическим эффектом, возникающим под действием сил Кориолиса [3].
В результате действия сил Кориолиса вибрирующие заряженные частицы материала пластины пьезоэлектрика 1 смещаются в направлении действия силы Кориолиса, изменяя распределение электрического потенциала. Так возникает разность потенциалов между электродами чувствительного элемента разности потенциалов 6, размещенными у противоположных краев пластины пьезоэлектрика.
Вибрирующие частицы материала пластины пьезоэлектрика 1, смещенные вследствие действия сил Кориолиса, через электроды 6 изменяют потенциалы на контактных шинах 2. Разность потенциалов между контактными шинами 2 является высокочастотным сигналом и может быть измерена, например, анализатором спектра [1].
Для обеспечения возможности суммирования на контактных шинах 2 разностей потенциалов одного знака между электродами 6 и контактными шинами 2 наносится слой поглотителя акустических колебаний 3 или контактные шины размещаются на ребрах жесткости (не показаны), нечувствительных к колебаниям поверхности пьезоэлектрической пластины. В качестве поглотителя акустических колебаний 3 могут использоваться резиноподобные клеи различных марок.
По разности потенциалов между контактными шинами 2 судят о величине угловой скорости вращения пластины пьезоэлектрика 1. Угловую скорость определяют, например, по градуировочной характеристике гироскопа. При отсутствии внешнего вращения основания гироскопа силы Кориолиса не возникают, поэтому не возникает и разность потенциалов между контактными шинами 2, которая в этом случае практически равна нулю.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполнены следующие условия:
— средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в приборостроении, а именно в системах навигации динамических объектов, в системах управления, в том числе в автомобильной промышленности и робототехнике;
— для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных и других известных до даты подачи заявки средств;
— средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности «промышленная применимость».
Источники информации
1. Морган Д. Устройства обработки сигналов на поверхностных акустических волнах / Пер. с англ. М.: Радио и связь, 1990.
2. Физическая акустика / Под ред. У.Мэзона. М.: Мир, 1969.
3. Кмита А.М., Медведь А.В. Поперечный акустоэлектрический эффект в слоистой структуре LiNbO3 — Si. «Письма ЖТФ»б, 1971, т.14, в.8, с.455.
1. Электронный гироскоп, содержащий пьезопластину, на которую нанесены встречно-штыревые преобразователи и отражающие структуры драйвера поверхностных акустических волн, отличающийся тем, что за пределами встречно-штыревых преобразователей драйвера поверхностных акустических волн параллельно направлению распространения поверхностных акустических волн дополнительно попарно, на расстояниях между двумя соседними парами электродов, не меньших половины периода поверхностных акустических волн, размещены электроды чувствительного элемента разности потенциалов, по одному электроду каждой пары у одного из противоположных краев пьезопластины, причем те из электродов каждой пары, которые находятся ближе к одному и тому же краю пьезопластины, электрически соединены под слоем поглотителя акустических колебаний с одной и той же контактной шиной, а находящиеся в одной паре электроды размещены один против другого, но ближе к противоположным краям пьезопластины.
2. Электронный гироскоп по п.1, отличающийся тем, что контактные шины размещены на ребрах жесткости, находящихся на краях пьезопластины и параллельных основному направлению распространения поверхностных акустических волн.
Гироскоп Википедия
Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852)До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издавна люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы, основанные на гравитации: отвес и уровень. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Древней Греции были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоанн Боненбергер и опубликовал описание своего изобретения в 1817 году[1]. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства[2]. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе[3]. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас рекомендовал это устройство в учебных целях[6]. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента[7]. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
История создания гироскопа и гироскопических приборов
В Пермском музее науки и техники ОАО «ПНППК» в рамках цикла еженедельных просветительских встреч состоялась беседа с доцентом ПГНИУ Нико
В Пермском музее науки и техники ОАО «ПНППК» в рамках цикла еженедельных просветительских встреч состоялась беседа с доцентом ПГНИУ Николаевым Юрием Константиновичем об истории создания гироскопа и гироскопических приборов.
|
СПРАВКА Автор и ведущий: Николаев Юрий Константинович, доцент ПГНИУ, действительный член Международной туристской академии, член геральдической комиссии при губернаторе Пермского края, член союза журналистов России, председатель Пермского отделения Всероссийского геральдического общества, член союза геральдистов России. |
 |
До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издревле люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Европе были созданы астролябия и другие приборы, основанные на положении звёзд. Гироскоп изобрёл Иоганн Боненбергер в 1802 году и опубликовал описание своего изобретения в 1817 году. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском. Карда́нов подве́с — универсальная шарнирная опора, позволяющая закреплённому в ней объекту вращаться одновременно в нескольких плоскостях. Главным свойством карданова подвеса является то, что если в него закрепить вращающееся тело, то оно будет сохранять направление оси вращения независимо от ориентации самого подвеса. Это свойство нашло применение в гироскопах, применяющихся в авиации и космонавтике. Держатели судовых компасов или просто сосудов с питьём в транспортных средствах тоже используют карданов подвес, который позволяет предмету находиться в вертикальном положении несмотря на толчки и тряску. Подвес получил своё название по имени Джероламо Кардано (1501 — 1576), который не только не изобрёл его, но даже и не претендовал на авторство: он описал это устройство в своей получившей широкую известность книге «De subtilitate rerum» («Хитроумное устройство вещей», 1550 г.). Карданов подвес был впервые изобретён греческим инженером Филоном Византийским в III в. до н.э. В одном из своих трудов Филон описывает восьмигранную чернильницу с отверстиями на каждой стороне. Можно было перевернуть восьмигранник любой стороной кверху, но чернила не проливались. Секрет заключался в том, что чернильница находилась в центре хитроумно установленных концентрических металлических колец, поэтому она сохраняла устойчивость независимо от положения. После античности карданов подвес был широко известен в мусульманском мире. В IX веке, через 1100 лет после изобретения, устройство стало снова известно в Европе благодаря арабам. А еще через 800 лет известный учёный Роберт Гук и другие изобретатели стали использовать этот принцип не для стабилизации центрального элемента, а для приложения внешних сил. Этому западному изобретению дали название универсального шарнира Гука. Именно оно легло в основу механизма силовой передачи современных автомобилей.
 |
| Компас нового времени, использующий карданов подвес (1570 г.) |
Самое раннее упоминание этого устройства в китайской литературе относится к 140 г. до н.э. Предполагаемым изобретателем устройства считается Фан Фэн. Подвес Фан Фэна применялся в масляных лампах, в которых лампадка крепилась на кольцах, скрепленных в двух противоположных точках, что позволяло сохранять ей вертикальное положение. Принцип данного устройства был вскоре забыт. В сочинении «Всесторонние записки западной столицы», изданном в 189 г., сообщается что создателем «курительницы для постели» с применением особого подвеса был Дин Хуань. После этого карданов подвес часто применялся в разных устройствах. Начиная с эпохи Сун, с помощью карданова подвеса крепилось сиденье императора на паланкине, что позволяло сидеть ему вертикально, даже если носильщики наклоняли паланкин. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления, через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Преимуществом гироскопа перед более древними приборами является то, что он правильно работает в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако гироскоп быстро останавливался из-за трения. Во второй половине XIX века Труве предложил использовать электродвигатель для разгона и поддержания движения гироскопа. Впервые на практике гироскоп был применён в 1896 году австрийским инженером Л.Обри для стабилизации курса торпеды. Следующее применение гироскопа в технике также относится к морскому делу. Гироскоп использовали при разработке морского указателя курса – гирокомпаса. Прототип современного гирокомпаса первым создал Герман Аншютц-Кэмпфе (запатентован в 1908), вскоре подобный прибор построил американский инженер Э. Сперри (запатентован в 1911). История изобретения гирокомпаса такова: немецкий инженер Герман Аншютц-Кэмпфе предложил проект экспедиции подводной лодки на северный полюс Земли. Для ориентации подводной лодки был необходим прибор для указания курса. Магнитный компас использовать было нельзя, так как в высоких широтах он не работает из-за больших возмущений магнитного поля Земли. К тому времени были известны работы французского инженера Артура Кребса (1889г.), который при проведении экспериментов на подводной лодке предложил смещать центр тяжести гироскопа с горизонтальным расположением оси вращения по вертикали , что фактически означало изобретение морского маятникового гирокомпаса. Экспедиция к северному полюсу Земли не состоялась, но Г. Аншютц-Кемпфе была предложена очень удачная конструктивная схема морского гирокомпаса. В последующие годы разрабатывалось множество гирокомпасов различных модификаций, но наиболее удачные из них принципиально почти не отличались от устройств Аншютца и Сперри. Э. Сперри пытался оспорить у Г.Аншютца-Кемпфе приоритет изобретения гирокомпаса в суде, но дело проиграл. Главным экспертом в этом судебном деле был Альберт Эйнштейн, который встал на сторону Г.Аншютца-Кемпфе. Морские гирокомпасы современной конструкции значительно усовершенствованы по сравнению с первыми моделями; они отличаются высокой точностью и надежностью и удобнее в эксплуатации. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках. Русская авиация не только не отставала от зарубежных стран в деле использования гироскопических приборов на самолете, но часто являлась пионером их внедрения. Так, например, в 1917 г. русские летчики А.Н. Журавченко и Г.Н. Алехнович совершили на самолете «Илья Муромец» слепой полет, выдерживая прямолинейный курс в заданном направлении по гироскопическому указателю поворотов. Этот прибор, разработанный П.П. Шиловским специально для авиации, позволил провести самолет по заранее намеченному курсу при полном отсутствии видимости земных ориентиров. Работы советских ученых А.Н. Крылова, Б.В. Булгакова, С.С. Тихменева, Г.В. Коренева, А.Р. Бонина, Г.О. Фридлен-дера и многих других в содружестве с выдающимися конструкторами Е.Ф. Антиповым, Е.В. Ольманом, Р.Г. Чичикяном, А.И. Марковым и другими талантливыми инженерами обеспечили оснащение советской авиации высококачественными гироскопическими приборами. В двадцатых годах XX столетия в дополнение к указателю поворотов создаются авиационные гироскопические указатели, курса и горизонта, которые стали в настоящее время обязательными навигационными приборами самолета любого типа. В начале тридцатых годов советские конструкторы Д.А. Браславский, М.М. Качкачян и М.Г. Эйлькинд первыми в мире разработали, построили и испытали гиромагнитный компас, получивший в настоящее время широкое распространение в авиации всех стран мира. Идею определения местоположения объекта с помощью двукратного интегрирования по времени проекций вектора ускорения, измеряемого на борту, запатентовал Рейнгард Вуссов в 1905 году. Для этого он предложил поместить на объекте акселерометр, ось чувствительности которого стабилизировалась с помощью свободного гироскопа. Указанная заявка в своей основе содержала идею метода навигации, в дальнейшем названного инерциальным. Суть этого метода состоит в определении координат объекта посредством расположенных на нем гироскопов, маятников (акселерометров) и часов без использования во время движения сторонней информации. Кроме того, практически одновременно с Вуссовым были запатентованы идеи американского и русского изобретателей М. Керри (1903 г.) и В.В. Алексеева (1911 г.) инерциальных систем геометрического типа, которые должны обеспечивать определение координат объекта, движущегося на поверхности вращающегося земного шара. В 30е годы XX века были сформулированы основные принципы инерциальной навигации. Историю инерциальной навигации в нашей стране принято начинать с момента разработки в 1932 году авиационной приборной вертикали с интегральной коррекцией, невозмущаемой горизонтальными силами инерции. В дальнейшем идею этой разработки стали называть схемой Л.М. Кофмана и Е.Б. Левенталя. В соответствии с этой схемой гироплатформа с жестко связанными с нею двумя ньютонометрами (акселерометрами) управлялась сигналами, пропорциональными интегралам от показаний ньютонометров, причем коэффициент пропорциональности выбирался так, чтобы выполнялись условия невозмущаемости. Как легко показать, такое устройство является моделью маятника Шулера. Оно послужило прообразом инерциальных навигационных систем с горизонтируемой платформой. Следует заметить, что схема, близкая к схеме Кофмана-Левенталя, была предложена в Германии в 1934 году Иоганном Бойковым. В годы второй мировой войны в Германии были созданы первые гироскопические ракетные приборы. Система гироскопических приборов ракеты Фау-2, состоящая из гирогоризонта, гировертиканта и гироскопического датчика регулирования скорости полета, стала классической системой гироприборов в ракетной технике, не потерявшей своей актуальности и в настоящее время.
Литература.
1. Johann G. F. Bohnenberger (1817) «Beschreibung einer Maschine zur Erläuterung der Gesetze der Umdrehung der Erde um ihre Axe, und der Veränderung der Lage der letzteren» («Описание машины для объяснения законов вращения Земли вокруг своей оси и изменения направления последней») Tübinger Blätter für Naturwissenschaften und Arzneikunde, vol. 3, pages 72-83. В интернете: http://www.ion.org/museum/files/File_1.pdf
2. Simeon-Denis Poisson (1813) «Mémoire sur un cas particulier du mouvement de rotation des corps pesans» («Статья об особом случае вращательного движения массивных тел»), Journal de l’École Polytechnique, vol. 9, pages 247—262. В интернете: http://www.ion.org/museum/files/File_2.pdf
3.Фото гироскопа Боненбергера: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
4.Walter R. Johnson (January 1832) «Description of an apparatus called the rotascope for exhibiting several phenomena and illustrating certain laws of rotary motion, » The American Journal of Science and Art, 1st series, vol. 21, no. 2, pages 265—280. В интернете: http://books.google.com/books?id=BjwPAAAAYAAJ&pg=PA265&lpg=PR5&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
5. Illustrations of Walter R. Johnson’s gyroscope («rotascope») appear in: Board of Regents, Tenth Annual Report of the Board of Regents of the Smithsonian Institution…. (Washington, D.C.: Cornelius Wendell, 1856), pages 177—178. В интернете: http://books.google.com/books?id=fEyT4sTd7ZkC&pg=PA178&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
6. Wagner JF, «The Machine of Bohnenberger, » The Institute of Navigation. В интернете: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
7. L. Foucault (1852) «Sur les phénomènes d’orientation des corps tournants entraînés par un axe fixe à la surface de la terre, « Comptes rendus hebdomadaires des séances de l’Académie des Sciences (Paris), vol. 35, pages 424—427. В интернете: http://www.bookmine.org/memoirs/pendule.html . Scroll down to «Sur les phénomènes d’orientation …»
8. (1) Julius Plücker (September 1853) «Über die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166, no. 9, pages 174—177; (2) Julius Plücker (October 1853) «Noch ein wort über die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166, no. 10, pages 348—351; (3) Charles Wheatstone (1864) «On Fessel’s gyroscope, » Proceedings of the Royal Society of London, vol. 7, pages 43-48.