Как работает гироскоп: Как это устроено: Гироскопы | Журнал «Физика» № 15 за 2009 год
Как это устроено: Гироскопы | Журнал «Физика» № 15 за 2009 год
Материал к уроку
См. также № 1, 3, 5, 7, 9, 11, 13/09
Гироскопы – это скрытый мозг, поддерживающий на курсе самолёты в воздухе, спутники на орбите и суда в океане. Первые гироскопы для практического применения начали выпускаться в 1910 г. фирмой Sperry Gyroscope Co. Это были судовые стабилизаторы и так называемый «искусственный горизонт», который показывал пилотам высоту полёта. После смерти изобретателя и основателя фирмы Элмера Сперри в 1930 г. многочисленные дочерние фирмы продолжили дело и воплотили 400 его патентов в автоматизированные системы навигации и наведения военного назначения, предназначенные для использования в самолётах, ракетах, бомбах, спутниках и космических аппаратах. Сегодня гироскопы, как неотъемлемая часть навигационной системы, устанавливаются на роботах, в антиблокировочных системах (предотвращающих пробуксовывание колёс автомобиля), на автомобильных приборных досках, в космических летательных аппаратах и космических телескопах, марсоходах и системах индивидуального передвижения космонавтов в открытом космосе.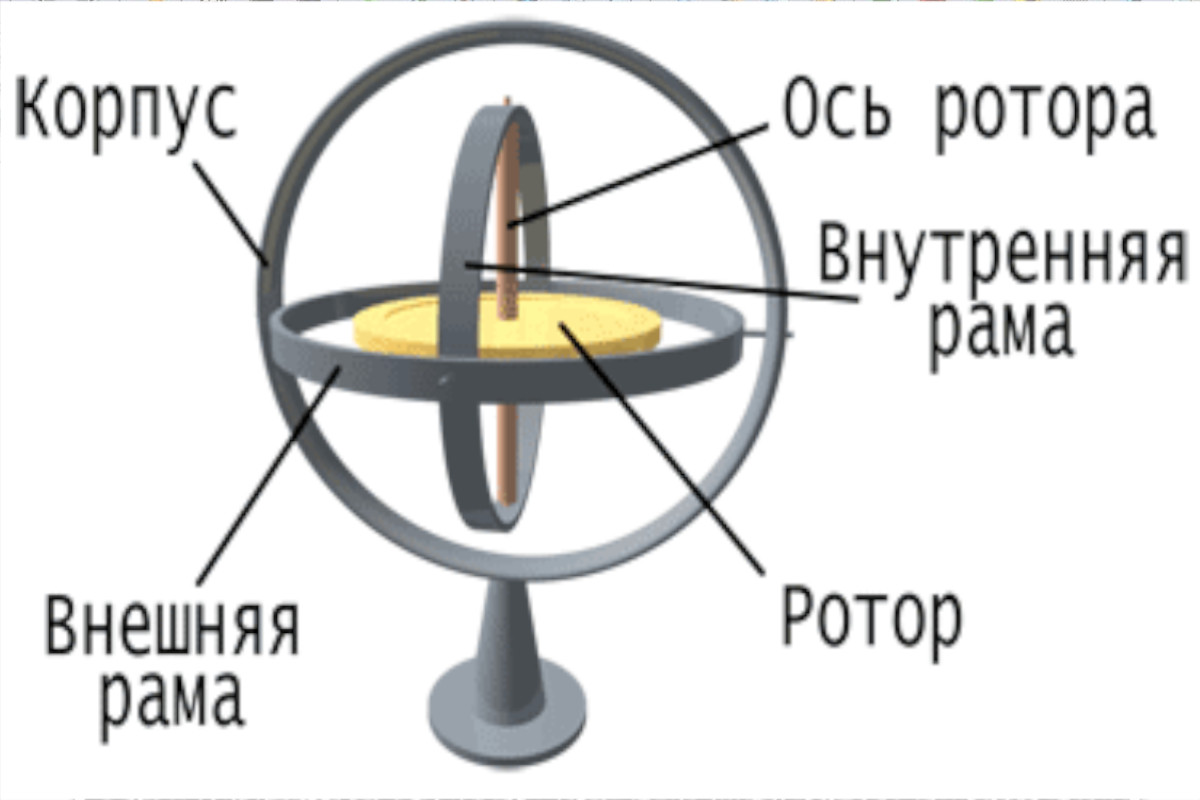
 Если гироскоп связан с акселерометрами (приборами, измеряющими скорость самолёта), то может функционировать как автопилот, т.е. автоматически поддерживать самолёт на курсе. Механических гироскопов сейчас всё меньше и меньше. В 1980-х гг. появились кольцевые лазерные и световодные гироскопы, которые точнее отслеживают изменения параметров полёта по изменению интерференционной картины. Кроме того, они легче и компактнее. Стоит лазерный гироскоп 3–4 тыс. долл. Путём микромеханической обработки кварца или кремния делают также крошечные гироскопы, чувствующие параметры вибраций. Они не такие точные, но зато могут производиться в больших количествах, как интегральные схемы, и довольно дёшевы – примерно по 20 долл. за штуку. Применяются такие гироскопы в бытовых устройствах и, в частности, в автомобилях.
Если гироскоп связан с акселерометрами (приборами, измеряющими скорость самолёта), то может функционировать как автопилот, т.е. автоматически поддерживать самолёт на курсе. Механических гироскопов сейчас всё меньше и меньше. В 1980-х гг. появились кольцевые лазерные и световодные гироскопы, которые точнее отслеживают изменения параметров полёта по изменению интерференционной картины. Кроме того, они легче и компактнее. Стоит лазерный гироскоп 3–4 тыс. долл. Путём микромеханической обработки кварца или кремния делают также крошечные гироскопы, чувствующие параметры вибраций. Они не такие точные, но зато могут производиться в больших количествах, как интегральные схемы, и довольно дёшевы – примерно по 20 долл. за штуку. Применяются такие гироскопы в бытовых устройствах и, в частности, в автомобилях.• В микромеханическом гироскопе кремниевое кольцо свободно подвешено на изогнутых кремниевых пружинках, которые одним концом крепятся к неподвижной центральной шайбе. Когда на управляющие электроды подаётся напряжение, то под действием электростатических сил кольцо начинает вибрировать, возникает стоячая волна, которую отслеживают считывающие электроды. Если кольцо под действием внешних сил поворачивается, стоячая волна искажается, и сигнал о направлении поворота поступает на считывающие электроды. По величине искажений можно судить о скорости поворота.
Когда на управляющие электроды подаётся напряжение, то под действием электростатических сил кольцо начинает вибрировать, возникает стоячая волна, которую отслеживают считывающие электроды. Если кольцо под действием внешних сил поворачивается, стоячая волна искажается, и сигнал о направлении поворота поступает на считывающие электроды. По величине искажений можно судить о скорости поворота.
• В кольцевом лазерном гироскопе при подаче напряжения на два анода и катод газ возбуждается и генерируются две световые волны одной и той же частоты, распространяющиеся в противоположных направлениях. На детекторе возникает интерференционная картина. Если кольцо поворачивается под действием внешней силы, то одна волна распространяется немного быстрее другой, и по изменению интерференционной картины можно судить о скорости и направлении поворота. Чтобы частоты пучков слегка различались исходно, миниатюрный моторчик трясёт лазер.
• В гироскопе с динамической подстройкой железный ротор приводится во вращение двигателем постоянного тока и вращается в подшипниках с постоянной скоростью.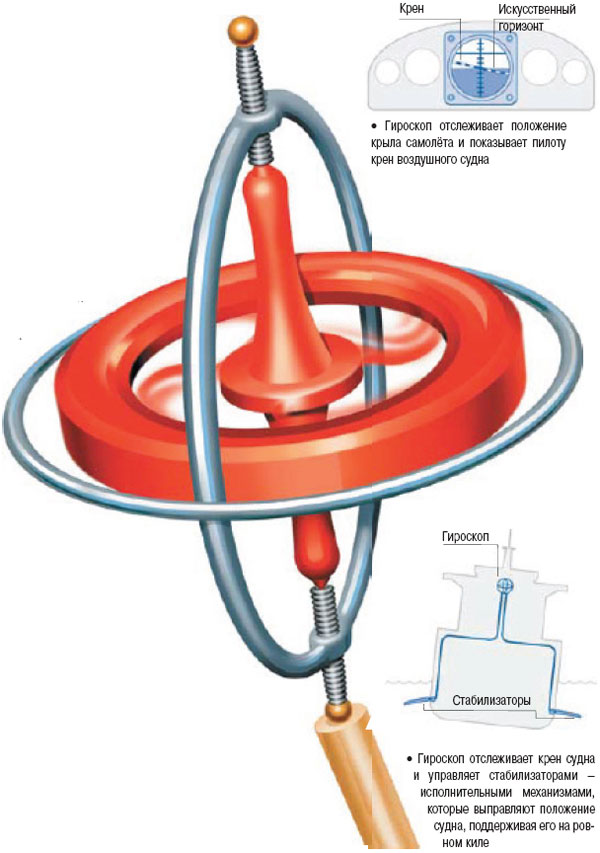 Если гироскоп поворачивается под действием внешней силы, ротор начинает прецессировать, что вызывает изменение магнитного поля и появление сигнала, который несёт информацию о направлении и скорости поворота. Этот сигнал также воздействует на магниты подстройки, которые компенсируют прецессию, не допуская тем самым, чтобы ротор упёрся в кожух.
Если гироскоп поворачивается под действием внешней силы, ротор начинает прецессировать, что вызывает изменение магнитного поля и появление сигнала, который несёт информацию о направлении и скорости поворота. Этот сигнал также воздействует на магниты подстройки, которые компенсируют прецессию, не допуская тем самым, чтобы ротор упёрся в кожух.
Знаете ли вы, что?..
• Стабильность показаний (уход) гироскопа зависит от трения в подшипниках и температуры. Наилучший пока результат – 0,01 град/ч, что позволяет навести снаряд на цель с точностью 1 морская миля (1,6 км) после часа полёта. Во время афганской войны бомбы наводились гироскопами с уходом 1 град/ч. Гироскопы в антиблокировочных автомобильных устройствах имеют уход 3600 град/ч, но вполне удовлетворяют потребителя, поскольку они задействованы очень короткое время, всего несколько секунд.
• В 1914 г. на аэрошоу в Париже Лоуренс Сперри, сын изобретателя гироскопа, продемонстрировал действие этого устройства: он провёл свой биплан на бреющем полёте, убрав руки с ручек управления, а его механик в это время прогуливался по крылу. Позднее отец и сын изобрели устройство, названное ими автоматическим пилотом, которое позволило Вилли Посту осуществить в 1933 г. первый кругосветный полёт. Автопилоты на судах часто называют «Железный Майк» (Metal Mike), признавая его невидимым членом экипажа.
Позднее отец и сын изобрели устройство, названное ими автоматическим пилотом, которое позволило Вилли Посту осуществить в 1933 г. первый кругосветный полёт. Автопилоты на судах часто называют «Железный Майк» (Metal Mike), признавая его невидимым членом экипажа.
• Законы США запрещают экспорт высокоточных гироскопов. В 1999 г. был арестован китайский бизнесмен, который пытался приобрести световодный гироскоп, предназначенный для наведения «умных» бомб. В 1995 г. ныряльщики подняли такой гироскоп со дна Тигра вблизи Багдада и передали его СССР, где в то время разрабатывались системы наведения баллистических ракет.
Продолжение следует
Scientific American, 2002, June, p. 96–97.
Сокр. пер. с англ. Н.Д.Козловой
MEMS-акселерометры и гироскопы — разбираемся в спецификации / Хабр
“Хьюстон, у нас проблемы”, — устало раздалось в мозгу, пытающемся в ночи продраться сквозь Datasheet IMU MPU-9250 от InvenSense.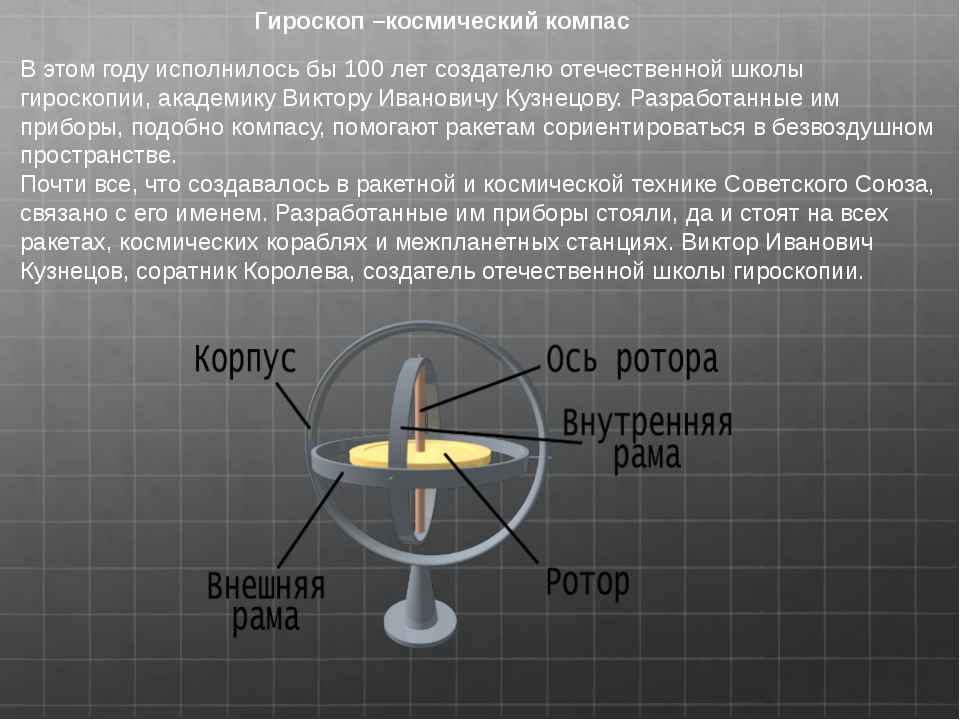
Немного об основных блоках инерционного модуля.
MEMS-гироскоп
MPU-9250 состоит из трёх независимых одноосных вибрационных датчиков угловой скорости (MEMS гироскопов), которые реагируют на вращение вокруг X-, Y-, Z- осей. Две подвешенные массы совершают колебания по противоположным осям. С появлением угловой скорости эффект Кориолиса вызывает изменение направления вибрации (
, которое фиксируется емкостным датчиком. Измеряемая дифференциальная емкостная составляющая пропорциональна углу перемещения [Время Электроники]. Получившийся сигнал усиливается, демодулируется и фильтруется, давая в итоге напряжение, пропорциональное угловой скорости вращения.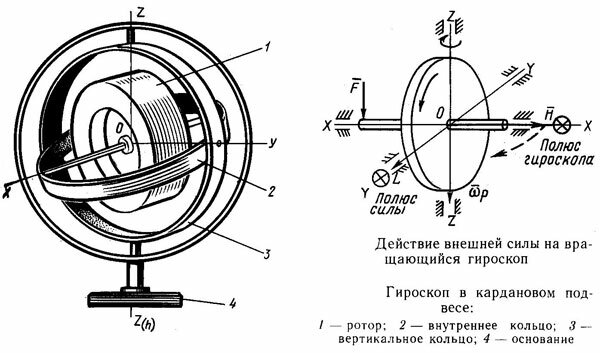
Трёхосевой MEMS-акселерометр
Использует для каждой оси отдельную пробную массу, которая смещается при возникновении ускорения вдоль данной оси (фиксируются емкостными датчиками). Архитектура MPU-9250 снижает подверженность температурному дрейфу и вариациям электропараметров. При расположении устройства на плоской поверхности оно измерит 0g по X- и Y-осям и +1g по Z-оси.
Масштабный коэффициент (scale factor — отношение изменения выходного сигнала к изменению выходного измеряемого сигнала) калибруется на заводе и не зависит от напряжения питания. Каждый сенсор снабжен индивидуальным сигма-дельта АЦП (состоит из модулятора и цифрового фильтра низких частот, подробнее про устройство в [Easyelectronics]), выходной цифровой сигнал которого имеет настраиваемый диапазон измерений.
И сразу про трёхосевой MEMS-магнетометр
Основан на высокоточной технологии эффекта Холла. Включает в себя магнитные сенсоры, определяющие напряжённость магнитного поля земли по осям, схему управления, цепь усиления сигнала и вычислительную схему для обработки сигналов с каждого датчика. Каждый АЦП имеет разрешение 16 бит, диапазон измерений
. Для измерения слабых магнитных полей применяют либо единицу в системе СИ микротесла (мкТл), либо гаусс (Гс, система СГС):
, [Радиолоцман]).
Итак, что такое LSB и как его посчитать? Инструкция по добыче
Допустим, наш акселерометр сейчас работает в диапазоне измерений
, то есть полный размах возможных значений будет
. Соответствующие им значения напряжений оцифровываются 16-битным АЦП, который может разбить весь интервал максимально на
ступеней. Минимальный инкремент, который можно засечь, — это как раз одна ступенька
. Тут надо помнить, что счёт ведётся с нуля, так что на самом деле максимально измеряемое значение будет
. То есть, чем больше бит в цифровом слове АЦП или ЦАП, тем меньше будет расхождение. При этом
То есть, чем больше бит в цифровом слове АЦП или ЦАП, тем меньше будет расхождение. При этом
датчика на конкретном диапазоне будет определяться как соотношение электрического выходного сигнала и механического воздействия. Традиционно указывается для частоты сигнала 100 Гц и температуры
Для MPU-9250 чувствительность составляет
ступеней на каждые g или
(
,
), для другого IMU, BMI088 от Bosch Sensortec, чувствительность гироскопа высчитывается так же, а для акселерометра используется
ступеней на каждое g.
Варианты FS вытаскиваем из спецификации на гироскопы и, чтобы дважды не вставать, акселерометры.
FS для акселерометров я брала ещё и из документации на BMI088 (см. ниже).
| Гироскоп, 16 бит | Акселерометр, 16 бит | ||
|---|---|---|---|
| Диапазон (FS), (dps) | LSB, (dps) | Диапазон (FS), g | LSB, mg |
| (FS = 250) | 0,004 | (FS = 4) | 0,06 |
| (FS = 500) | 0,008 | (FS = 6) | 0,09 |
| (FS = 1000) | 0,0015 | (FS = 8) | 0,12 |
| (FS = 2000) | 0,03 | (FS = 12) | 0,18 |
| (FS = 4000) | 0,06 | (FS = 16) | 0,24 |
| (FS = 24) | 0,37 | ||
| (FS = 32) | 0,48 | ||
| (FS = 48) | 0,73 | ||
Всё, вроде бы, встало на свои места, можно идти дальше. В некоторых случаях (ниже, например, вырезка из документации на BMI088) отдельно указывается такой параметр, как разрешение (Resolution).
В некоторых случаях (ниже, например, вырезка из документации на BMI088) отдельно указывается такой параметр, как разрешение (Resolution).
По факту, вроде бы, получается, что это должен быть LSB. Но почему тогда мы видим одно значение вместо нескольких, завязанных на конкретные диапазоны? Пришлось расширять список исследуемых источников в поисках ответов.
Что такое разрешение (Resolution)?
Минимальная величина, которую достоверно видит датчик, крайне важная при попытке соблюсти баланс между ценой и производительностью. Это не точность — сенсор с высоким разрешением может быть не особо точным, равно как и сенсор с малым разрешением в определённых областях может обладать достаточной точностью. К сожалению, LSB определяет лишь теоретическое минимально-различимое значение при условии, что мы можем использовать все 16 бит АЦП. Это разрешение в цифровом мире. В аналоговом какая-то часть ступеней будет зашумлена и число эффективных бит будет меньше.
Какие бывают характеристики шума и откуда что берётся?
Источники шума можно в общем разбить на электронный шум схемы, преобразующей движение в сигнал напряжения (джонсоновский тепловой шум, дробовой шум, розовый 1/f фликкер-шум и т. д.), и тепловой механический (броуновский, обусловленный наличием мелких подвижных частей) от самого сенсора. Характеристики последнего будут зависеть от резонансной частоты механической части системы
д.), и тепловой механический (броуновский, обусловленный наличием мелких подвижных частей) от самого сенсора. Характеристики последнего будут зависеть от резонансной частоты механической части системы
(собственной частоты колебаний сенсора
).
Среднеквадратичное значение шумов во всём спектральном диапазоне — Total RMS (Root mean square) Noise
Уровни шума можно определять несколькими способами. Можно рассматривать их во временной или частотной области (после преобразования Фурье). В первом случае берут остаточный шум как среднеквадратичное значение сигналов от неподвижного датчика (по факту это стандартное отклонение для выборки при
) за некоторый промежуток времени:
Ускорения или угловые скорости вращения меньше уровня широкополосного шума будут неразличимы — вот и фактическое разрешение. Среднеквадратичное значение переменного напряжения или тока (часто называется действующим или эффективным) равно величине постоянного сигнала, действие которого произведёт такую же работу в активной (резистивной) нагрузке за время периода. Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.
Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.
Для белого шума отношение амплитуды (мгновенного пикового значения) к среднеквадратчному с вероятностью 99.9% составляет Называется такое отношение крест-фактором (crest factor, cross ratio). Можно выбрать вероятность 95.5% — крест фактор будет равен 4.
На деле же сигналы шума ведут себя не так хорошо и могут выдавать пики, увеличивающие крест-фактор до 10 раз. В некоторых спецификациях можно найти значения или сам множитель.
В узкой низкочастотной полосе 0.1-10 Гц основную роль играет фликкер-шум “1/f”, для оценки которого используют значение размаха шумового сигнала (peak-to-peak).
Спектральная плотность
Иногда сигнал удобнее рассматривать в частотной области, где его описание называется
спектром(зависимость амплитуды и фазы от частоты). Одна из возможных характеристик шума в спецификациях зовётся
power spectral density of noise (PSD), noise spectral density, noise power density,или попросту
noise density). Описывает распределение мощности шума по диапазону частот. Вне зависимости от представления электрического сигнала через ток или напряжение мгновенную рассеиваемую на нагрузке мощность можно нормировать (R = 1 Ом) и выразить её как
Описывает распределение мощности шума по диапазону частот. Вне зависимости от представления электрического сигнала через ток или напряжение мгновенную рассеиваемую на нагрузке мощность можно нормировать (R = 1 Ом) и выразить её как
Средняя мощность, рассеиваемая сигналом в течение промежутка времени
Мощность – скорость поступления энергии. Через энергию определяются детерминированные и непериодические сигналы. Периодические и случайные сигналы выражаются через мощность, поскольку они не ограничены по времени и, соответственно, энергии, при этом в любой момент времени их средняя мощность отлична от нуля
Можно вспомнить [Sklyar], что произвольный периодический сигнал выражается через комбинацию бесконечного числа гармоник с возрастающими частотами:
что после представления косинуса и синуса в экспоненциальной форме
и замены
можно записать в виде
где комплексные коэффициенты (спектральные компоненты) ряда Фурье для
,
В общем случае эти коэффициенты представимы следующим образом:
Амплитудным и фазовым спектром называют графики зависимости
и
от частоты. Спектральная плотность мощности
Спектральная плотность мощности
периодического сигнала
даёт распределение мощности сигнала по диапазону частот:
и имеет размерность
Средняя нормированная мощность действительного сигнала будет
Непериодические случайные сигналы (в частности, шум) можно описать как периодические в предельном смысле. Если
стремится к бесконечности, последовательность импульсов превращается в отдельный импульс
, число спектральных линий стремится к бесконечности, график спектра превращается в гладкий спектр частот
Для данного предельного случая можно определить пару интегральных преобразований Фурье
и
где
— Фурье-образ.
Спектральная плотность мощности случайного сигнала определяется через предел
и описывает распределение мощности сигнала в диапазоне частот.
Поскольку мы предполагаем, что среднее для белого шума датчиков в неподвижном состоянии равно нулю (), то квадрат среднеквадратического значения равен дисперсии и представляет собой полную мощность в нормированной нагрузке:
Смотрим в спецификации — там на самом деле под именем спектральной плотности указан квадратный корень из неё с соответствующей размерностью
или
То есть значение RMS шума без указания полосы частот, на которой он считался (Bandwidth), бессмысленно.
Чуть подробнее про выбор полосы пропускания
На выходе MEMS-датчика мы получаем сигналы разной частоты. Предполагается, что мы заранее имеем некое представление об измеряемых нами процессах. К примеру, при определении вектора ускорения дрона шумом являются вибрации аппарата. Отделить их от полезного сигнала можно с помощью фильтра низких частот, который обрежет все частоты выше указанной (к примеру, 200 Гц). MPU-9250 предоставляет возможность настроить частоту среза фильтра низких частот с помощью параметра с магическим названием
DLPFCFG. Расшифровывается он как Digital Low Pass Filter Configuration. Далее в спецификации там и тут всплывали не менее загадочные выражения типа (DLPFCFG = 2, 92Hz), но за расшифровкой пришлось лезть в другой документ, “Register Map and Descriptions”. Там показано, какие наборы битов в какие регистры надо записать для достижения желаемых эффектов:
Опуская технические подробности конфигурирования, можно сказать следующее.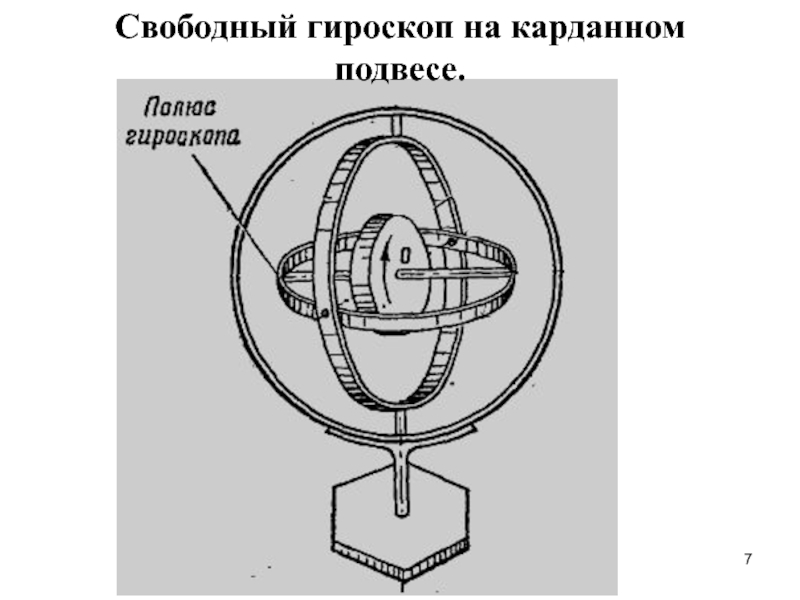 В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.
В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.
В таблицу режимов фильтра акселерометра добавилась колонка «Плотность шума» в , а “Bandwidth” колонка дополнилась значением “3dB”.
Легче не стало, так что пройдёмся прямо по списку.
Наследие Древнего Рима
Частота дискретизации + децимация -АЦП = скорость обновления данных (digital output data rate, ODR)
С частотой дискретизации (она же частота семплирования) всё понятно — это количество взятых за секунду точек непрерывного по времени сигнала при его дискретизации АЦП. Измеряется в герцах.
Для того, чтобы в выборку попало значение, приближенное к пиковой амплитуде сигнала, важно брать частоту дискретизации минимум в 10 раз больше частоты полезного сигнала. MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
Но это абсолютно не значит, что сигнал на выходе акселерометра или гироскопа появляется с тем же периодом.
Если взять те же дроны, тут всё упирается в борьбу за снижение энергопотребления, повышение скорости вычислений и снижение шума выходных данных. Можно понизить частоту обновления данных на выходе, позволив внутренним алгоритмам интегрировать входную информацию в течение некоторого периода времени. Среднеквадратичный понизится, но также сузится и полоса пропускания (датчик сможет засечь лишь те процессы, частота которых будет меньше 50% скорости обновления данных).
Тут лучше сразу вспомнить теорему Котельникова. Она обещает, что при дискретизации аналогового сигнала можно избежать потерь информации (то есть восстановить сигнал без искажений), если частота полезного сигнала будет не больше половины частоты дискретизации, называемой также частотой Найквиста. На практике классический антиалайзинговый фильтр (фильтр низких частот, уменьшающий вклад побочных частотных компонентов в выходном сигнале до пренебрежимо малых уровней — ГОСТ Р 8. 714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
Для Fs = 32kHz частота Найквиста будет 16kHz. При этом полезный сигнал вряд ли выйдет за полосу fa = 20Hz (мало кто может менять направление движения чаще 20 раз в секунду). Итого, частота дискретизации значительно превышает частоту, требуемую для сохранения информации, содержащейся в полосе fa (40Hz, в 400 раз превышает), то есть полезный сигнал избыточно дискретизирован. Полоса между частотами fa и fs-fa не содержит никакой полезной информации. Можно уменьшить частоту дискретизации (на диаграмме это сделано с коэффициентом М, [7]), проредив последовательность семплов (отсчётов). Этот процесс и называется децимацией.
Согласно спецификации на MPU-9250, акселерометры снабжены сигма-дельта АЦП. Схемы на его основе потребляют минимальную мощность. Надо отметить, что полоса пропускания у данных преобразователей весьма узкая, не превышает звукового диапазона [Easyelectronics], но для штатного квадрокоптера больше и не нужно.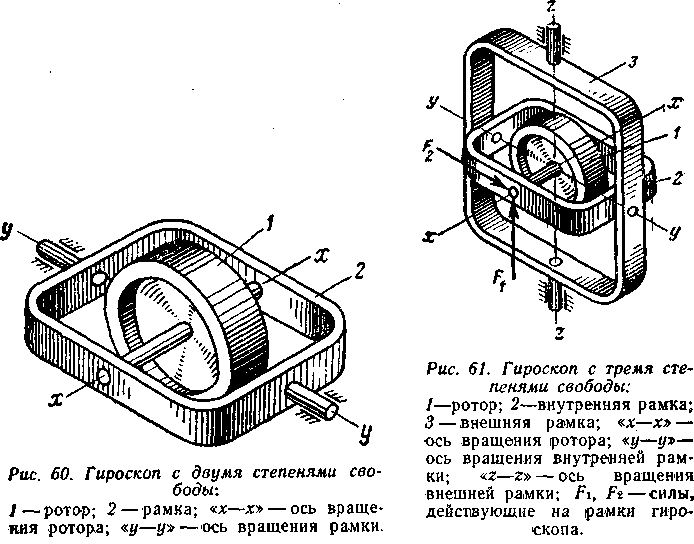 Состоят они из двух блоков: -модулятора и цифрового децимирующего фильтра низких частот.
Состоят они из двух блоков: -модулятора и цифрового децимирующего фильтра низких частот.
Зачем объединять фильтр низких частот и децимацию?
Честная выдержка из Вики:
Если исходный сигнал не содержит частот, превышающих частоту Найквиста децимированного сигнала, то форма спектра полученного (децимированного) сигнала совпадает с низкочастотной частью спектра исходного сигнала. Частота дискретизации, соответствующая новой последовательности отсчётов, в N раз ниже, чем частота дискретизации исходного сигнала.
Если исходный сигнал содержит частоты, превышающие частоту Найквиста децимированного сигнала, то при децимации будет иметь место алиасинг (наложение спектров).
Таким образом, для сохранения спектра необходимо до децимации удалить из исходного сигнала частоты, превышающие частоту Найквиста децимированного сигнала. В спецификации на MPU-9250 не очень много информации о характеристиках DLPF, но можно найти исследования энтузиастов [9].
Bandwidth, она же frequency response (частотный отклик)
диапазон частот, в котором датчик обнаруживает движение и выдает действительный выходной сигнал.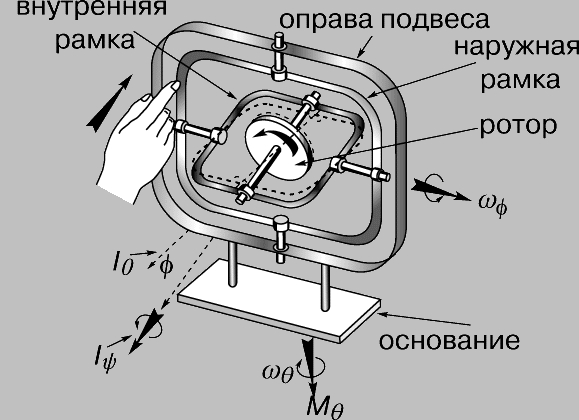 В некоторых спецификациях приводится частотная характеристика датчика — зависимость электрического выходного сигнала акселерометра от внешних механических воздействий с фиксированной амплитудой, но различными частотами. В пределах полосы пропускания неравномерность частотной характеристики не превышает заданной. В случае применения цифрового фильтра низких частот выбор полосы пропускания как раз позволяет изменять частоту среза, неизбежно оказывая влияние на скорость отклика датчика на изменения положения в пространстве. Частота среза обязана быть меньше половины скорости оцифровки (digital output data rate, ODR), называемой также частотой Найквиста.
В некоторых спецификациях приводится частотная характеристика датчика — зависимость электрического выходного сигнала акселерометра от внешних механических воздействий с фиксированной амплитудой, но различными частотами. В пределах полосы пропускания неравномерность частотной характеристики не превышает заданной. В случае применения цифрового фильтра низких частот выбор полосы пропускания как раз позволяет изменять частоту среза, неизбежно оказывая влияние на скорость отклика датчика на изменения положения в пространстве. Частота среза обязана быть меньше половины скорости оцифровки (digital output data rate, ODR), называемой также частотой Найквиста.
Для акселерометров MPU-9250 границы полосы пропускания определяются так, чтобы внутри диапазона спектральная плотность сигнала отличалась от пиковой (на частоте 0 Гц) не больше, чем на -3дБ. Этот уровень примерно соответствуют падению до половины спектральной плотности (или 70.7% от пиковой спектральной амплитуды). Напомню, для энергетических величин (мощность, энергия, плотность энергии), пропорциональных квадратам силовых величин поля, выраженное в децибелах отношение
.
Итог: сигналы, прошедшие через ФНЧ, менее зашумлены, у них лучшее разрешение, но при этом меньшая полоса пропускания.
Поэтому указание разрешения в спецификации без привязки к полосе пропускания смысла не имеет.Вернёмся к разрешению
В спецификации на MPU-9250 сведений о разрешении в принципе нет, для BMI088 под именем «Разрешение» представлены цифровое разрешение (LSB) и чувствительность»:
Оценить разрешение для каждой полосы пропускания можно по пиковому шуму Среднеквадратичная величина шума на выходе связана с указанной в спецификации спектральной плотностью (а вернее, корнем из неё) и эквивалентной шумовой полосой пропускания (equivalent noise bandwidth, ENBW, — полоса пропускания эквивалентной системы, имеющей прямоугольную АЧХ и одинаковые с исходной системой значение на нулевой частоте и дисперсию на выходе, при воздействии на входы систем белого шума):
А шумовая полоса пропускания связана с 3dB полосой коэффициентами, соответствующим порядку низкочастотного фильтра:
Судя по исследованию в [MPU9250_DLPF], наш выбор 1. 57. Полученное среднеквадратическое значение учитывает вклад белого шума (ни шума квантования, ни механического шума там нет). Например, для акселерометра расчётное значение для
57. Полученное среднеквадратическое значение учитывает вклад белого шума (ни шума квантования, ни механического шума там нет). Например, для акселерометра расчётное значение для
получается
. При этом в спецификации отдельно указан полный среднеквадратичный шум
Расхождение значительное. К сожалению, он указан лишь для одной полосы, а для акселерометра BMI088 в спецификации указано только PSD. Так что будем использовать что есть. Кросс-фактор возьмём 4. Теперь самое интересное. Отношение
даст примерный порядок эффективных бит на данном диапазоне измерений, который прилично меньше 16-битного разрешения АЦП.
Delay (ms), или откуда берётся задержка
Из необходимости сохранять во внутреннем буфере переменные для деления фильтром сигнала на разные частоты
Итого. Чем ниже частота обрезания фильтра, тем меньше шума в сигнале. Но тут надо быть осторожным, потому что одновременно с этим вырастает и задержка. Кроме того, можно пропустить полезный сигнал [8].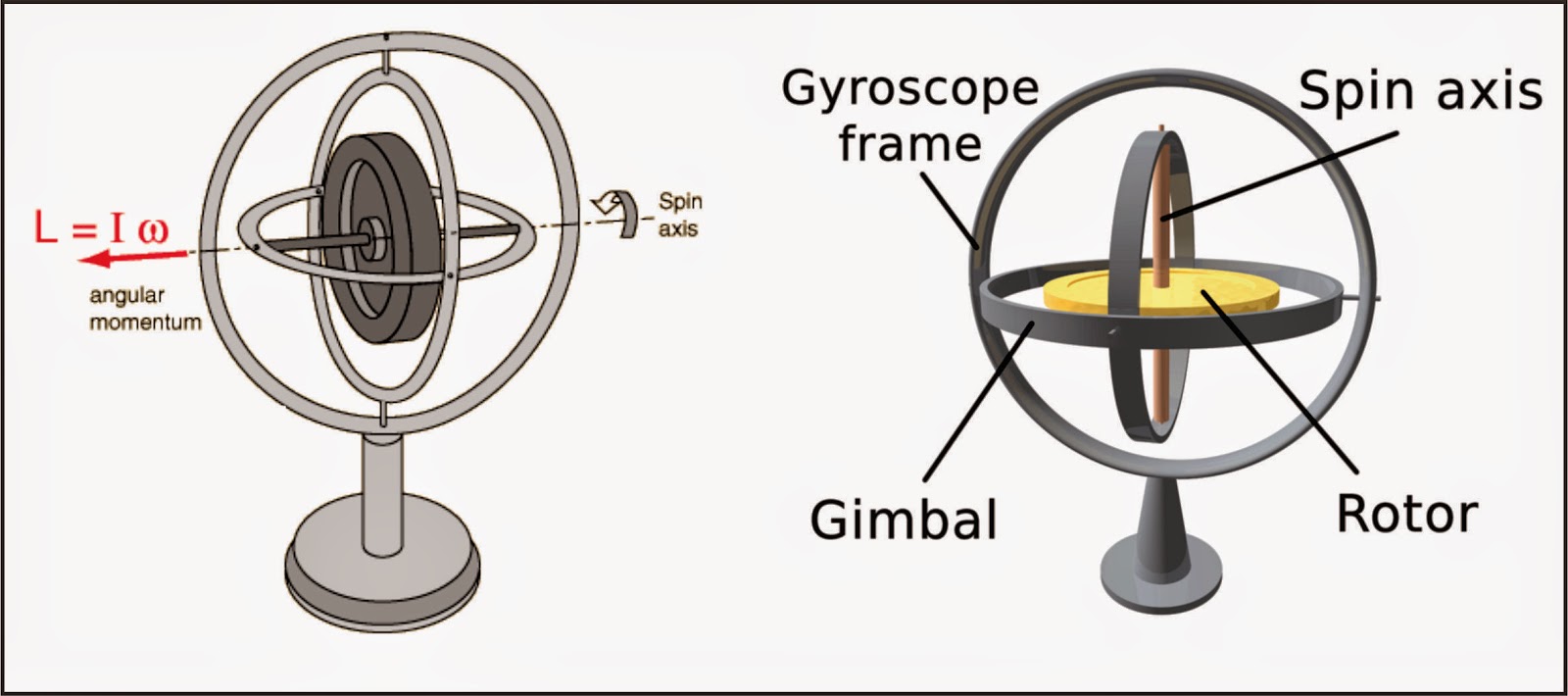
| MPU-9250 | BMI088 | ||
|---|---|---|---|
| Гироскоп, 16 бит | |||
| Диапазон (FS), (dps) | Разрешение, бит (BW=92Hz) | Диапазон (FS), (dps) | Разрешение, бит (BW=64Hz) |
| 8 | |||
| 9 | 9 | ||
| 10 | 10 | ||
| 11 | 11 | ||
| 12 | 12 | ||
| Акселерометр | |||
| Диапазон (FS), g | Разрешение, бит | Диапазон (FS), g | Разрешение (по X,Y), бит |
| 6 | 8 | ||
| 7 | 9 | ||
| 8 | 10 | ||
| 9 | 11 | ||
И это лишь самые основные параметры.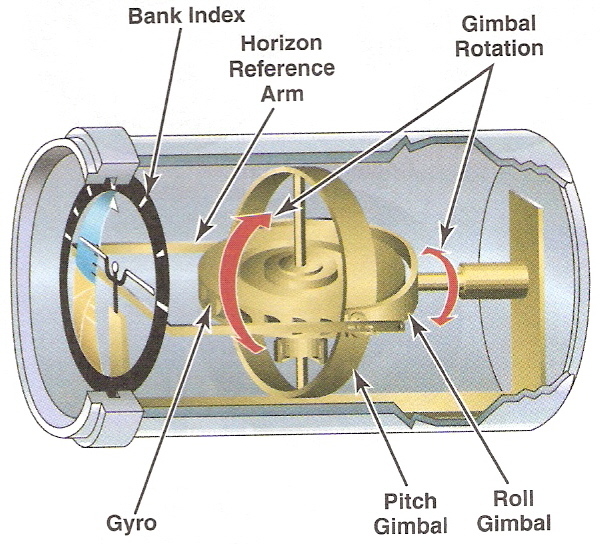
Откуда что бралось:
- Самый приятный документ от Freescale Semiconductor — «How Many Bits are Enough?»
- [EE] — «Resolution vs Accuracy vs Sensitivity Cutting Through the Confusion»
- [Время электроники] — «МЭМС-датчики движения от STMicroelectronics: акселерометры и гироскопы»
- [LSB] — «An ADC and DAC Least Significant Bit (LSB)»
- [Measurement Computing] — «TechTip: Accuracy, Precision, Resolution, and Sensitivity»
- [KIT] — «Акселерометры Analog Devices — устройство и применение»
- [Easyelectronics] — «Сигма-дельта АЦП»
- [Радиолоцман] — «Магнитометры: принцип действия, компенсация ошибок»
- [SO] — «Noise Measurement»
- [Mide] — «Accelerometer Specifications: Deciphering an Accelerometer’s Datasheet»
- [CiberLeninka] — Delta-Sigma ADC Filter
- [SciEd] — «Особенности реализации цифровой фильтрации с изменением частоты дискретизации»
- [MPU6050] — «Using the MPU6050’s DLPF»
- [MPU9250_DLPF] — MPU9250 Gyro Noise DLPF work investigation
- Understanding Sensor Resolution Specifications
- Siemens Digital Signal Processing
- МЭМС-датчики движения от STMicroelectronics
- [TMWorld] — «Evaluating inertial measurement units»
- [Sklyar] – Скляр Б.
 Цифровая связь. Теоретические основы и практическое применение.
Цифровая связь. Теоретические основы и практическое применение.
 Цифровая связь. Теоретические основы и практическое применение.
Цифровая связь. Теоретические основы и практическое применение.Что такое гироскоп. Как это работает: гироскоп
ГИРОСКОП
навигационный прибор, основным элементом которого является быстро вращающийся ротор, закрепленный так, что ось его вращения может поворачиваться. Три степени свободы (оси возможного вращения) ротора гироскопа обеспечиваются двумя рамками карданова подвеса. Если на такое устройство не действуют внешние возмущения, то ось собственного вращения ротора сохраняет постоянное направление в пространстве. Если же на него действует момент внешней силы, стремящийся повернуть ось собственного вращения, то она начинает вращаться не вокруг направления момента, а вокруг оси, перпендикулярной ему (прецессия).
В хорошо сбалансированном (астатическом) и достаточно быстро вращающемся гироскопе, установленном на высокосовершенных подшипниках с незначительным трением, момент внешних сил практически отсутствует, так что гироскоп долго сохраняет почти неизменной свою ориентацию в пространстве. Поэтому он может указывать угол поворота основания, на котором закреплен. Именно так французский физик Ж. Фуко (1819-1868) впервые наглядно продемонстрировал вращение Земли. Если же поворот оси гироскопа ограничить пружиной, то при соответствующей установке его, скажем, на летательном аппарате, выполняющем разворот, гироскоп будет деформировать пружину, пока не уравновесится момент внешней силы. В этом случае сила сжатия или растяжения пружины пропорциональна угловой скорости движения летательного аппарата. Таков принцип действия авиационного указателя поворота и многих других гироскопических приборов. Поскольку трение в подшипниках очень мало, для поддержания вращения ротора гироскопа не требуется много энергии. Для приведения его во вращение и для поддержания вращения обычно бывает достаточно маломощного электродвигателя или струи сжатого воздуха.
Поэтому он может указывать угол поворота основания, на котором закреплен. Именно так французский физик Ж. Фуко (1819-1868) впервые наглядно продемонстрировал вращение Земли. Если же поворот оси гироскопа ограничить пружиной, то при соответствующей установке его, скажем, на летательном аппарате, выполняющем разворот, гироскоп будет деформировать пружину, пока не уравновесится момент внешней силы. В этом случае сила сжатия или растяжения пружины пропорциональна угловой скорости движения летательного аппарата. Таков принцип действия авиационного указателя поворота и многих других гироскопических приборов. Поскольку трение в подшипниках очень мало, для поддержания вращения ротора гироскопа не требуется много энергии. Для приведения его во вращение и для поддержания вращения обычно бывает достаточно маломощного электродвигателя или струи сжатого воздуха.
Применение. Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления.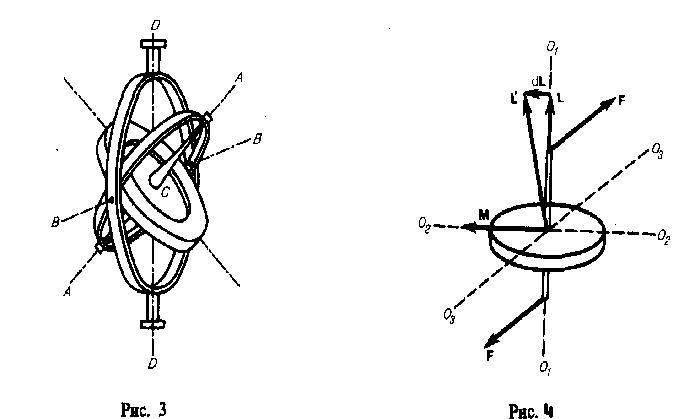 В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
См. также МАХОВИК . Основные области применения гироскопов — судоходство, авиация и космонавтика (см. ИНЕРЦИАЛЬНАЯ НАВИГАЦИЯ). Почти каждое морское судно дальнего плавания снабжено гирокомпасом для ручного или автоматического управления судном, некоторые оборудованы гиростабилизаторами. В системах управления огнем корабельной артиллерии много дополнительных гироскопов, обеспечивающих стабильную систему отсчета или измеряющих угловые скорости. Без гироскопов невозможно автоматическое управление торпедами. Самолеты и вертолеты оборудуются гироскопическими приборами, которые дают надежную информацию для систем стабилизации и навигации. К таким приборам относятся авиагоризонт, гировертикаль, гироскопический указатель крена и поворота. Гироскопы могут быть как указывающими приборами, так и датчиками автопилота. На многих самолетах предусматриваются гиростабилизированные магнитные компасы и другое оборудование — навигационные визиры, фотоаппараты с гироскопом, гиросекстанты. В военной авиации гироскопы применяются также в прицелах воздушной стрельбы и бомбометания. Гироскопы разного назначения (навигационные, силовые) выпускаются разных типоразмеров в зависимости от условий работы и требуемой точности. В гироскопических приборах диаметр ротора составляет 4-20 см, причем меньшее значение относится к авиационно-космическим приборам. Диаметры же роторов судовых гиростабилизаторов измеряются метрами.
В военной авиации гироскопы применяются также в прицелах воздушной стрельбы и бомбометания. Гироскопы разного назначения (навигационные, силовые) выпускаются разных типоразмеров в зависимости от условий работы и требуемой точности. В гироскопических приборах диаметр ротора составляет 4-20 см, причем меньшее значение относится к авиационно-космическим приборам. Диаметры же роторов судовых гиростабилизаторов измеряются метрами.
ОСНОВНЫЕ ПОНЯТИЯ
Гироскопический эффект создается той же самой центробежной силой, которая действует на юлу, вращающуюся, например, на столе. В точке опоры юлы о стол возникают сила и момент, под действием которых ось вращения юлы отклоняется от вертикали, а центробежная сила вращающейся массы, препятствуя изменению ориентации плоскости вращения, вынуждает юлу вращаться и вокруг вертикали, сохраняя тем самым заданную ориентацию в пространстве. Таким вращением, называемым прецессией, ротор гироскопа отвечает на приложенный момент силы относительно оси, перпендикулярной оси его собственного вращения.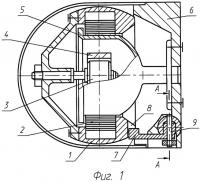 Вклад масс ротора в этот эффект пропорционален квадрату расстояния до оси вращения, поскольку чем больше радиус, тем больше, во-первых, линейное ускорение и, во-вторых, плечо центробежной силы. Влияние массы и ее распределения в роторе характеризуется его «моментом инерции», т.е. результатом суммирования произведений всех составляющих его масс на квадрат расстояния до оси вращения. Полный же гироскопический эффект вращающегося ротора определяется его «кинетическим моментом», т.е. произведением угловой скорости (в радианах в секунду) на момент инерции относительно оси собственного вращения ротора. Кинетический момент — векторная величина, имеющая не только численное значение, но и направление. На рис. 1 кинетический момент представлен стрелкой (длина которой пропорциональна величине момента), направленной вдоль оси вращения в соответствии с «правилом буравчика»: туда, куда подается буравчик, если его поворачивать в направлении вращения ротора. Прецессия и момент силы тоже характеризуются векторными величинами.
Вклад масс ротора в этот эффект пропорционален квадрату расстояния до оси вращения, поскольку чем больше радиус, тем больше, во-первых, линейное ускорение и, во-вторых, плечо центробежной силы. Влияние массы и ее распределения в роторе характеризуется его «моментом инерции», т.е. результатом суммирования произведений всех составляющих его масс на квадрат расстояния до оси вращения. Полный же гироскопический эффект вращающегося ротора определяется его «кинетическим моментом», т.е. произведением угловой скорости (в радианах в секунду) на момент инерции относительно оси собственного вращения ротора. Кинетический момент — векторная величина, имеющая не только численное значение, но и направление. На рис. 1 кинетический момент представлен стрелкой (длина которой пропорциональна величине момента), направленной вдоль оси вращения в соответствии с «правилом буравчика»: туда, куда подается буравчик, если его поворачивать в направлении вращения ротора. Прецессия и момент силы тоже характеризуются векторными величинами. Направление вектора угловой скорости прецессии и вектора момента силы связано правилом буравчика с соответствующим направлением вращения.
Направление вектора угловой скорости прецессии и вектора момента силы связано правилом буравчика с соответствующим направлением вращения.
См. также ВЕКТОР .
ГИРОСКОП С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
На рис. 1 дана упрощенная кинематическая схема гироскопа с тремя степенями свободы (тремя осями вращения), причем направления вращения на ней показаны изогнутыми стрелками. Кинетический момент представлен жирной прямой стрелкой, направленной вдоль оси собственного вращения ротора. Момент силы прикладывается нажатием пальца так, что он имеет составляющую, перпендикулярную оси собственного вращения ротора (вторую силу пары создают вертикальные полуоси, закрепленные в оправе, которая связана с основанием). Согласно законам Ньютона, такой момент силы должен создавать кинетический момент, совпадающий с ним по направлению и пропорциональный его величине. Поскольку же кинетический момент (связанный с собственным вращением ротора) фиксирован по величине (заданием постоянной угловой скорости посредством, скажем, электродвигателя), это требование законов Ньютона может быть выполнено только за счет поворота оси вращения (в сторону вектора внешнего момента силы), приводящего к увеличению проекции кинетического момента на эту ось. Этот поворот и есть прецессия, о которой говорилось ранее. Скорость прецессии возрастает с увеличением внешнего момента силы и убывает с увеличением кинетического момента ротора.
Этот поворот и есть прецессия, о которой говорилось ранее. Скорость прецессии возрастает с увеличением внешнего момента силы и убывает с увеличением кинетического момента ротора.
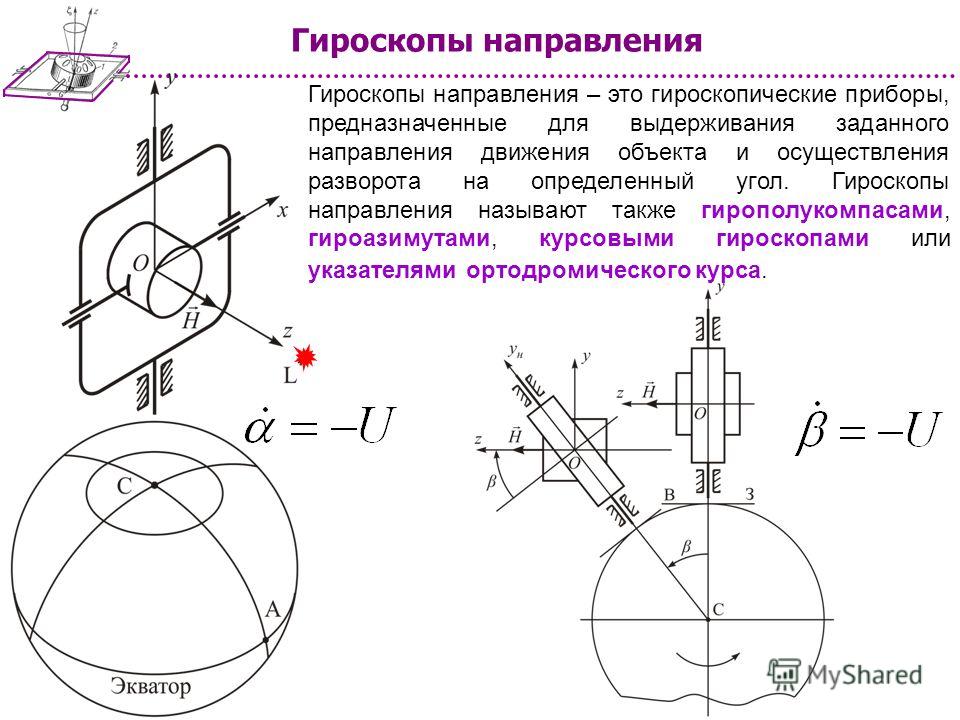
Гироскопический указатель курса. На рис. 2 показан пример применения трехстепенного гироскопа в авиационном указателе курса (гирополукомпасе). Вращение ротора в шарикоподшипниках создается и поддерживается струей сжатого воздуха, направленной на рифленую поверхность обода. Внутренняя и наружная рамки карданова подвеса обеспечивают полную свободу вращения оси собственного вращения ротора. По шкале азимута, прикрепленной к наружной рамке, можно ввести любое значение азимута, выровняв ось собственного вращения ротора с основанием прибора. Трение в подшипниках столь незначительно, что после того как это значение азимута введено, ось вращения ротора сохраняет заданное положение в пространстве, и, пользуясь стрелкой, скрепленной с основанием, по шкале азимута можно контролировать поворот самолета. Показания поворота не обнаруживают никаких отклонений, если не считать эффектов дрейфа, связанных с несовершенствами механизма, и не требуют связи с внешними (например, наземными) средствами навигации.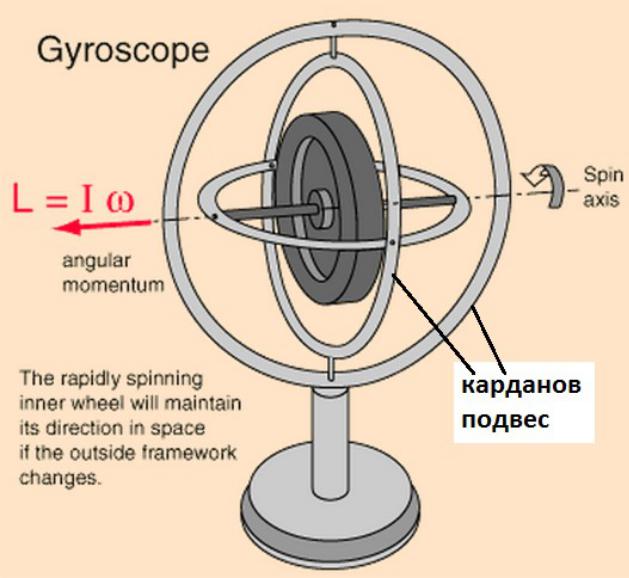
ДВУХСТЕПЕННЫЙ ГИРОСКОП
Во многих гироскопических приборах используется упрощенный, двухстепенный вариант гироскопа, в котором наружная рамка трехстепенного гироскопа устранена, а полуоси внутренней закрепляются непосредственно в стенках корпуса, жестко связанного с движущимся объектом. Если в таком устройстве единственная рамка ничем не ограничена, то момент внешней силы относительно оси, связанной с корпусом и перпендикулярной оси рамки, заставит ось собственного вращения ротора непрерывно прецессировать в сторону от этого первоначального направления. Прецессия будет продолжаться до тех пор, пока ось собственного вращения не окажется параллельной направлению момента силы, т.е. в положении, при котором гироскопический эффект отсутствует. На практике такая возможность исключается благодаря тому, что задаются условия, при которых поворот рамки относительно корпуса не выходит за пределы малого угла. Если прецессия ограничивается только инерционной реакцией рамки с ротором, то угол поворота рамки в любой момент времени определяется проинтегрированным ускоряющим моментом.
 Поскольку момент инерции рамки обычно сравнительно мал, она слишком быстро реагирует на вынужденное вращение. Имеются два способа устранить этот недостаток.
Поскольку момент инерции рамки обычно сравнительно мал, она слишком быстро реагирует на вынужденное вращение. Имеются два способа устранить этот недостаток.Противодействующая пружина и вязкостный демпфер. Датчик угловой скорости. Прецессию оси вращения ротора в направлении вектора момента силы, направленного вдоль оси, перпендикулярной оси рамки, можно ограничить пружиной и демпфером, воздействующими на ось рамки. Кинематическая схема двухстепенного гироскопа с противодействующей пружиной представлена на рис. 3. Ось вращающегося ротора закреплена в рамке перпендикулярно оси вращения последней относительно корпуса. Входной осью гироскопа называется направление, связанное с основанием, перпендикулярное оси рамки и оси собственного вращения ротора при недеформированной пружине.
Момент внешней силы относительно опорной оси вращения ротора, приложенный к основанию в тот момент времени, когда основание не вращается в инерциальном пространстве и, следовательно, ось вращения ротора совпадает со своим опорным направлением, заставляет ось вращения ротора прецессировать в сторону входной оси, так что угол отклонения рамки начинает увеличиваться.
 Это эквивалентно приложению момента силы к противодействующей пружине, в чем состоит важная функция ротора, который в ответ на возникновение входного момента силы создает момент силы относительно выходной оси (рис. 3). При постоянной входной угловой скорости выходной момент силы гироскопа продолжает деформировать пружину, пока создаваемый ею момент силы, воздействующий на рамку, не заставит ось вращения ротора прецессировать вокруг входной оси. Когда скорость такой прецессии, вызванной моментом, создаваемым пружиной, сравняется с входной угловой скоростью, достигается равновесие и угол рамки перестает изменяться. Таким образом, угол отклонения рамки гироскопа (рис. 3), указываемый стрелкой на шкале, позволяет судить о направлении и угловой скорости поворота движущегося объекта. На рис. 4 показаны основные элементы указателя (датчика) угловой скорости, ставшего в настоящее время одним из самых обычных авиакосмических приборов.
Это эквивалентно приложению момента силы к противодействующей пружине, в чем состоит важная функция ротора, который в ответ на возникновение входного момента силы создает момент силы относительно выходной оси (рис. 3). При постоянной входной угловой скорости выходной момент силы гироскопа продолжает деформировать пружину, пока создаваемый ею момент силы, воздействующий на рамку, не заставит ось вращения ротора прецессировать вокруг входной оси. Когда скорость такой прецессии, вызванной моментом, создаваемым пружиной, сравняется с входной угловой скоростью, достигается равновесие и угол рамки перестает изменяться. Таким образом, угол отклонения рамки гироскопа (рис. 3), указываемый стрелкой на шкале, позволяет судить о направлении и угловой скорости поворота движущегося объекта. На рис. 4 показаны основные элементы указателя (датчика) угловой скорости, ставшего в настоящее время одним из самых обычных авиакосмических приборов.Вязкостное демпфирование. Для гашения выходного момента силы относительно оси двухстепенного гироузла можно использовать вязкостное демпфирование.
 Кинематическая схема такого устройства представлена на рис. 5; она отличается от схемы на рис. 4 тем, что здесь нет противодействующей пружины, а вязкостный демпфер увеличен. Когда такое устройство поворачивается с постоянной угловой скоростью вокруг входной оси, выходной момент гироузла заставляет рамку прецессировать вокруг выходной оси. За вычетом эффектов инерционной реакции (с инерцией рамки связано в основном лишь некоторое запаздывание отклика) этот момент уравновешивается моментом сил вязкостного сопротивления, создаваемым демпфером. Момент демпфера пропорционален угловой скорости вращения рамки относительно корпуса, так что выходной момент гироузла тоже пропорционален этой угловой скорости. Поскольку этот выходной момент пропорционален входной угловой скорости (при малых выходных углах рамки), выходной угол рамки увеличивается по мере того, как корпус поворачивается вокруг входной оси. Стрелка, движущаяся по шкале (рис. 5), указывает угол поворота рамки. Показания пропорциональны интегралу угловой скорости вращения относительно входной оси в инерциальном пространстве, и поэтому устройство, схема которого представлена на рис.
Кинематическая схема такого устройства представлена на рис. 5; она отличается от схемы на рис. 4 тем, что здесь нет противодействующей пружины, а вязкостный демпфер увеличен. Когда такое устройство поворачивается с постоянной угловой скоростью вокруг входной оси, выходной момент гироузла заставляет рамку прецессировать вокруг выходной оси. За вычетом эффектов инерционной реакции (с инерцией рамки связано в основном лишь некоторое запаздывание отклика) этот момент уравновешивается моментом сил вязкостного сопротивления, создаваемым демпфером. Момент демпфера пропорционален угловой скорости вращения рамки относительно корпуса, так что выходной момент гироузла тоже пропорционален этой угловой скорости. Поскольку этот выходной момент пропорционален входной угловой скорости (при малых выходных углах рамки), выходной угол рамки увеличивается по мере того, как корпус поворачивается вокруг входной оси. Стрелка, движущаяся по шкале (рис. 5), указывает угол поворота рамки. Показания пропорциональны интегралу угловой скорости вращения относительно входной оси в инерциальном пространстве, и поэтому устройство, схема которого представлена на рис. 5, называется интегрирующим двухстепенным гиродатчиком.
5, называется интегрирующим двухстепенным гиродатчиком.На рис. 6 изображен интегрирующий гиродатчик, ротор (гиромотор) которого заключен в герметично запаянный стакан, плавающий в демпфирующей жидкости. Сигнал угла поворота плавающей рамки относительно корпуса вырабатывается индукционным датчиком угла. Положение поплавкового гироузла в корпусе задает датчик момента в соответствии с поступающими на него электрическими сигналами. Интегрирующие гиродатчики обычно устанавливают на элементах, снабженных сервоприводом и управляемых выходными сигналами гироскопа. При таком расположении выходной сигнал датчика момента можно использовать как команду на поворот объекта в инерциальном пространстве.
См. также ГИРОКОМПАС .
ЛИТЕРАТУРА
Ригли У., Холлистер У., Денхард У. Теория, проектирование и испытания гироскопов. М., 1972 Бабаева Н.Ф. Гироскопы. Л., 1973 Поплавский М.А. Теория гироскопов. Киев, 1986
Энциклопедия Кольера. — Открытое общество
. 2000
.
2000
.
Или технологией Bluetooth был чем-то необычным. Теперь же все эти функции стали привычными, а некоторые из них даже успели устареть. Производители добавляют в свои модели новые возможности, одна из которых — гироскоп в телефоне. Что же он из себя представляет, как применяется?
Гироскоп и акселерометр
Многие люди часто путают эти два понятия. Давайте разберёмся.
Акселерометр, или G-сенсор — устройство, которое отслеживает изменение положения девайса относительно своей оси — например, повороты влево-вправо, на себя и от себя.
Гироскоп в телефоне позволяет регистрировать не только эти действия, но и любые перемещения устройства в пространстве, а также фиксировать скорость перемещения. Поэтому можно считать его улучшенным акселерометром.
Принцип действия гироскопа
Устройство представляет собой диск, который закреплён на двух подвижных рамках. Он быстро вращается. При изменении положения этих рамок, диск не сдвигается с места.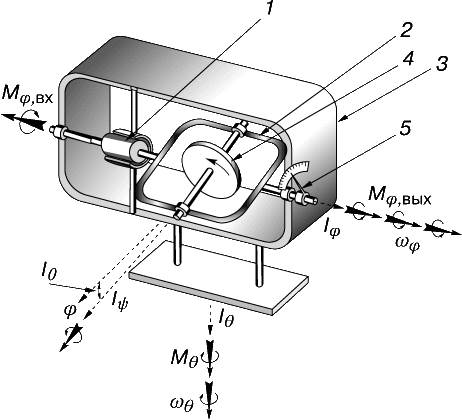 Если постоянно поддерживать вращение, например, с помощью электромотора, то можно с точностью определить положение объекта, на котором установлен гироскоп. Это может быть использовано и для определения сторон света.
Если постоянно поддерживать вращение, например, с помощью электромотора, то можно с точностью определить положение объекта, на котором установлен гироскоп. Это может быть использовано и для определения сторон света.
Варианты применения
Ещё в девятнадцатом веке гироскоп использовался военно-морскими силами и гражданскими судами, так как с помощью него можно было наиболее точно определить стороны света. Ещё он нашёл своё применение в авиации и ракетной технике.
Гироскоп iPhone 4
В Айфоне конструкция прибора немного отличается от классической, поскольку она выполнена на основе микроэлектромеханического датчика. Принцип же действия остаётся прежним.
Гироскоп в телефоне имеет очень большую сферу применения. Безусловно, в первую очередь это разнообразные игры, использующие данную технологию. Наиболее популярные среди них — гоночные симуляторы и шутеры. Для примера: в шутерах используется так называемая «дополненная реальность» — выстрелы производятся с помощью нажатия, а для того, чтобы прицелиться, нужно изменить положение смартфона — камера в игре передвинется точно так же.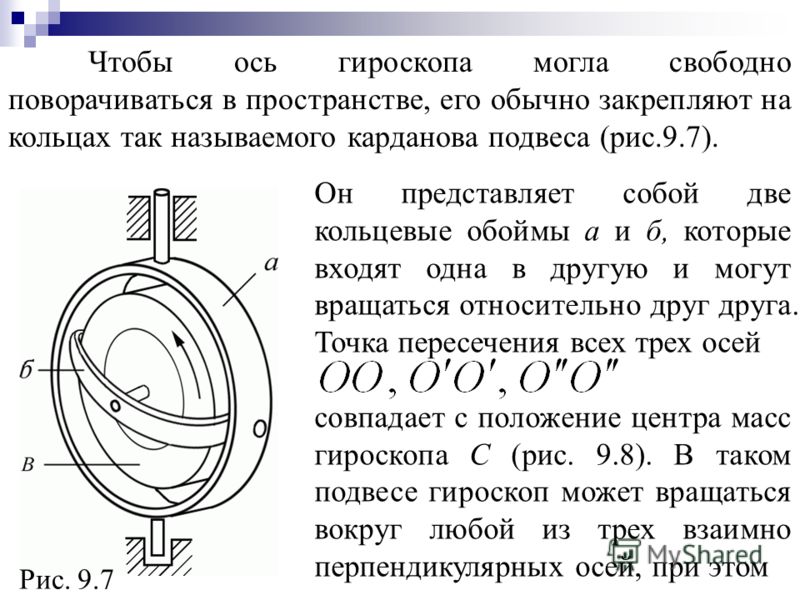
Кроме игровой индустрии, гироскоп применяется в разнообразном программном обеспечении. С его помощью доступ к различным функциям становится гораздо удобнее. Например, в некоторых операционных системах при встряхивании устройства происходит обновление Bluetooth. Ещё эта технология применяется в ряде специфических приложений, служащих для измерения угла наклона (уровня).
Мобильная индустрия в последнее время развивается всё быстрее и быстрее. Ещё недавно гироскоп в телефоне был модной новинкой, а теперь он используется повсеместно и считается привычной деталью любого смартфона. Возможно, всего через несколько лет появится новое поколение устройств, позволяющих проецировать изображение на любую точку пространства, ведь наука идёт вперёд семимильными шагами. Пока же мы можем только строить предположения по этому поводу и искать способы применения тем технологиям, которые уже изобретены.
Мобильные телефоны с каждым годом становятся сложнее. Чтобы пересчитать количество всех датчиков, встроенных в современные смартфоны, может не хватить пальцев обеих рук.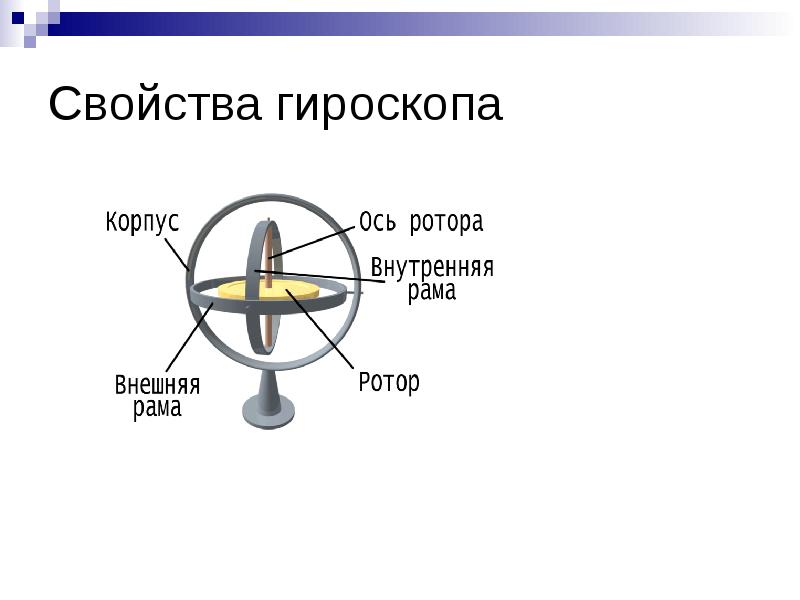 Гироскоп в телефоне – что это за сенсор, как он работает, каково его применение, можно ли отключить этот прибор? Эти вопросы будут рассмотрены для тех, кто хочет хорошо разбираться в своем смартфоне.
Гироскоп в телефоне – что это за сенсор, как он работает, каково его применение, можно ли отключить этот прибор? Эти вопросы будут рассмотрены для тех, кто хочет хорошо разбираться в своем смартфоне.
Что такое гироскоп
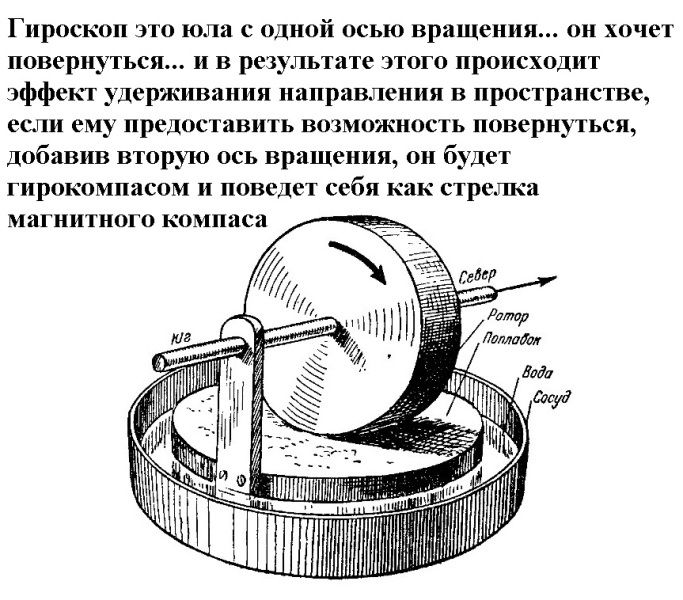
Юла, она же волчок – известная игрушка. Она при быстром вращении сохраняет устойчивость на одной точке опоры. Это незамысловатое устройство является простейшим примером гироскопа – приспособления, реагирующего на изменения углов ориентации тела, на котором оно установлено, в трех плоскостях. Термин впервые использовал французский физик и математик Жан Фуко.
Гироскопы классифицируют по количеству степеней свободы и по принципу действия (механические и оптические). Вибрационные гиродатчики, подвид механических, широко используются в мобильных устройствах. Применение GPS-навигации отодвинуло на второй план изначальную функцию гироскопов – помощь при ориентации на местности, но эта технология все еще незаменима в современных моделях телефонов.
Отличие от акселерометра
На современных мобильных гаджетах часто установлены оба эти прибора. Ключевое отличие гироскопа от акселерометра и других сенсоров заключается в самом принципе работы данных аппаратов. Первый определяет собственный угол наклона относительно земли, а второй способен измерять линейное ускорение. Преимущество акселерометра – знание ускорения позволяет точно вычислить расстояние, на которое было перемещено устройство.
Ключевое отличие гироскопа от акселерометра и других сенсоров заключается в самом принципе работы данных аппаратов. Первый определяет собственный угол наклона относительно земли, а второй способен измерять линейное ускорение. Преимущество акселерометра – знание ускорения позволяет точно вычислить расстояние, на которое было перемещено устройство.
На практике оба прибора могут как заменять, так и дополнять друг друга. Фактически и тот, и тот лишь регистрируют положение относительно земной поверхности. Как и гироскоп, акселерометр может передавать сведения об ускорении смартфону, на который он установлен.Часто используются оба датчика; они хорошо взаимодействуют. В таблице зафиксированы ключевые особенности приборов.
Принцип работы
Простыми словами, гироскоп – это волчок, быстро вращающийся вокруг вертикальной оси, закрепленный на раме, которая способна поворачиваться вокруг горизонтальной оси, и закреплена на другой раме, которая поворачивается вокруг третьей оси.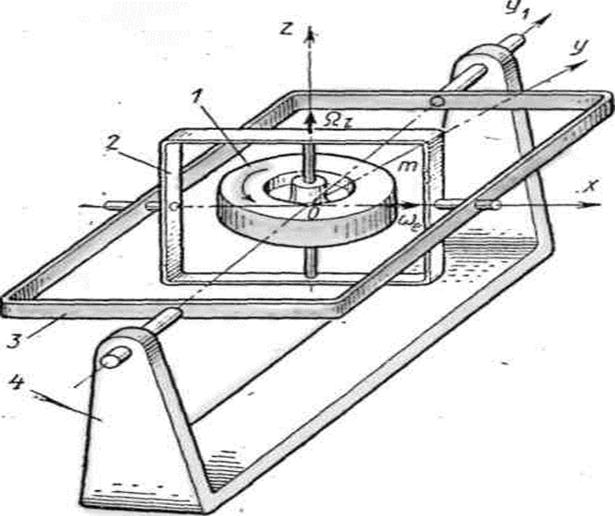 Как бы мы ни поворачивали волчок, он всегда имеет возможность все равно находиться в вертикальном положении. Датчики снимают сигнал, как волчок ориентирован относительно рам, а процессор получает информацию и считывает с высокой точностью, как рамы в этом случае должны быть расположены относительно силы тяжести.
Как бы мы ни поворачивали волчок, он всегда имеет возможность все равно находиться в вертикальном положении. Датчики снимают сигнал, как волчок ориентирован относительно рам, а процессор получает информацию и считывает с высокой точностью, как рамы в этом случае должны быть расположены относительно силы тяжести.
Что такое гироскоп в смартфоне
Современные мобильные устройства в большинстве своем оснащены гироскопами. Их еще называют гиродатчиками. Этот элемент смартфона работает на постоянной основе, автономно, не требует калибровки. Этот прибор не нужно включать, но в некоторых телефонах есть функция отключения с целью экономии энергии. Выполнен он в виде микроэлектромеханической схемы, расположенной под корпусом смартфона.
Для чего нужен
Внедрение технологии гиродачиков в мобильные девайсы существенно расширило их функционал и добавило новый способ управления устройствами. Например, простое встряхивание телефона позволит ответить на входящий звонок. Изменение ориентации экрана с помощью наклонов смартфона тоже реализовано благодаря гиродатчикам; этот прибор обеспечивает стабилизацию камеры. В приложении «Калькулятор» простой поворот экрана на 90 градусов открывает дополнительные функции программы.
Изменение ориентации экрана с помощью наклонов смартфона тоже реализовано благодаря гиродатчикам; этот прибор обеспечивает стабилизацию камеры. В приложении «Калькулятор» простой поворот экрана на 90 градусов открывает дополнительные функции программы.
Гиродатчик очень упростил пользование встроенными в смартфон картами. Если человек повернет свой девайс «лицом» к, скажем, конкретной улице, то это отобразится на карте с высокой точностью. Хороший смартфон с гироскопом обеспечивает пару интересных возможностей для мобильного гейминга. Управление виртуальным автомобилем становится невероятно реалистичным, когда для вождения машины используются повороты смартфона. В технологиях виртуальной реальности с помощью гиродатчиков отслеживаются повороты головы.
Как работает гироскопический датчик
В гиродатчике есть две массы, двигающиеся в противоположных направлениях. Когда появляется угловая скорость, на массу действует сила Кориолиса, направленная перпендикулярно их движению. Происходит смещение масс на величину, пропорциональную прикладываемой скорости. Меняется расстояние между подвижными и неподвижными электродами, что приводит к изменению емкости конденсатора и напряжению на его обкладках, а это уже электрический сигнал. Такие электронные сигналы и распознаются гиродатчиком.
Происходит смещение масс на величину, пропорциональную прикладываемой скорости. Меняется расстояние между подвижными и неподвижными электродами, что приводит к изменению емкости конденсатора и напряжению на его обкладках, а это уже электрический сигнал. Такие электронные сигналы и распознаются гиродатчиком.
Как узнать, есть ли гироскоп в смартфоне
Простой способ – ознакомиться с характеристиками девайса на официальном сайте производителя. Если гиродатчик имеется – это обязательно будет указано. Некоторые производители умалчивают о том, есть ли гироскоп на телефоне, не желая тратить на него место. Их можно понять – все сейчас стремятся сделать телефон легче и тоньше. В таких случаях помогут сторонние приложения.
На YouTube есть целый раздел видео, которые можно поворачивать на 360 градусов. Если у вас поддерживается возможность управления таким видео через повороты смартфона, значит работает гироскоп. Еще можно установить приложение AnTuTu Benchmark, которое проводит полную диагностику вашего устройства. Там вы найдете строку о наличии или отсутствии гироскопа.
Там вы найдете строку о наличии или отсутствии гироскопа.
В каких телефонах есть гироскоп
Первым смартфоном, в котором был установлен гиродатчик, является Iphone 4. Покупатели позитивно отнеслись к такому нововведению и с тех пор телефоны с гироскопом начали заполнять рынок. Все последующие версии смартфонов Apple были оборудованы гиродатчиками. Владельцам андроид-устройств в этом плане немного сложнее, благо, о наличии датчика можно спросить у консультанта перед покупкой, или проверить самому. Гироскоп в телефоне – это важный бонус.
Видео
ГИРОСКОП (от греческого γ?ρος — круг, окружность и σκοπ?ω — наблюдать), устройство, совершающее быстрые циклические (вращательные или колебательные) движения и чувствительное вследствие этого к повороту в инерциальном пространстве. Термин «гироскоп» предложен в 1852 году Ж. Б. Л. Фуко для изобретённого им прибора, предназначенного для демонстрации вращения Земли вокруг своей оси. Долгое время термин «гироскоп» использовался для обозначения быстровращающегося симметричного твёрдого тела. В современной технике гироскоп — основной элемент всевозможных гироскопических устройств или приборов, широко применяемых для автоматического управления движением самолётов, судов, торпед, ракет, космических аппаратов, мобильных роботов, для целей навигации (указатели курса, поворота, горизонта, стран света), для измерения угловой ориентации подвижных объектов и во многих других случаях (например, при прохождении стволов штолен, строительстве метрополитенов, при бурении скважин).
В современной технике гироскоп — основной элемент всевозможных гироскопических устройств или приборов, широко применяемых для автоматического управления движением самолётов, судов, торпед, ракет, космических аппаратов, мобильных роботов, для целей навигации (указатели курса, поворота, горизонта, стран света), для измерения угловой ориентации подвижных объектов и во многих других случаях (например, при прохождении стволов штолен, строительстве метрополитенов, при бурении скважин).
Классический гироскоп. Согласно законам ньютоновской механики скорость поворота оси быстровращающегося симметричного твёрдого тела в пространстве обратно пропорциональна его собственной угловой скорости и, следовательно, ось гироскопа поворачивается столь медленно, что на некотором интервале времени её можно использовать в качестве указателя неизменного направления в пространстве.
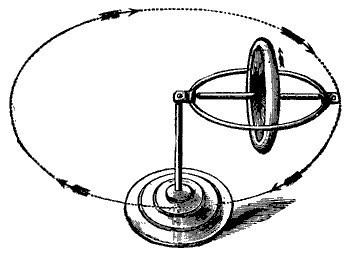
Простейшим гироскопом является волчок, парадоксальность поведения которого заключается в его сопротивлении изменению направления оси вращения.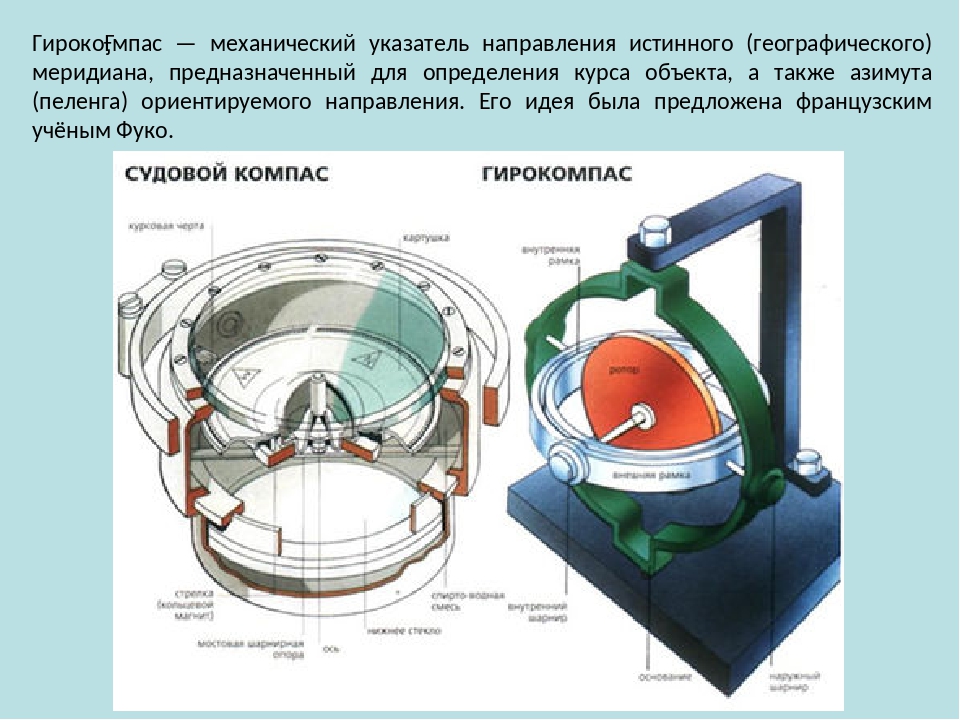 Под воздействием внешней силы ось волчка начинает двигаться в направлении, перпендикулярном вектору силы. Именно благодаря этому свойству вращающийся волчок не падает, а его ось описывает конус вокруг вертикали. Это движение называется прецессией гироскопа. Если к оси быстро вращающегося свободного гироскоп придожить пару сил {Р, Р’}, Р’ = -Р, с моментом М = Ph, где h — плечо пары сил (рис. 1), то (против ожидания) гироскоп начнёт дополнительно поворачиваться не вокруг оси х, перпендикулярной к плоскости пары сил, а вокруг оси у, лежащей в этой плоскости и перпендикулярной оси z вращения гироскопа. Если в какой-либо момент времени действие пары сил прекратится, то одновременно прекратится прецессия, т. е. прецессионное движение гироскопа безынерционно. Чтобы ось гироскопа могла свободно поворачиваться в пространстве, гироскоп обычно закрепляют в кольцах карданового подвеса (рис. 2), который представляет собой систему твёрдых тел (рамок, колец), последовательно соединённых между собой цилиндрическими шарнирами.
Под воздействием внешней силы ось волчка начинает двигаться в направлении, перпендикулярном вектору силы. Именно благодаря этому свойству вращающийся волчок не падает, а его ось описывает конус вокруг вертикали. Это движение называется прецессией гироскопа. Если к оси быстро вращающегося свободного гироскоп придожить пару сил {Р, Р’}, Р’ = -Р, с моментом М = Ph, где h — плечо пары сил (рис. 1), то (против ожидания) гироскоп начнёт дополнительно поворачиваться не вокруг оси х, перпендикулярной к плоскости пары сил, а вокруг оси у, лежащей в этой плоскости и перпендикулярной оси z вращения гироскопа. Если в какой-либо момент времени действие пары сил прекратится, то одновременно прекратится прецессия, т. е. прецессионное движение гироскопа безынерционно. Чтобы ось гироскопа могла свободно поворачиваться в пространстве, гироскоп обычно закрепляют в кольцах карданового подвеса (рис. 2), который представляет собой систему твёрдых тел (рамок, колец), последовательно соединённых между собой цилиндрическими шарнирами. Обычно при отсутствии технологических погрешностей оси рамок карданового подвеса пересекаются в одной точке — центре подвеса. Закреплённое в таком подвесе симметричное тело вращения (ротор) имеет три степени свободы и может совершать любой поворот вокруг центра подвеса. Гироскоп, у которого центр масс совпадает с центром подвеса, называется уравновешенным, астатическим или свободным. Изучение законов движения классического гироскопа — задача динамики твёрдого тела.
Обычно при отсутствии технологических погрешностей оси рамок карданового подвеса пересекаются в одной точке — центре подвеса. Закреплённое в таком подвесе симметричное тело вращения (ротор) имеет три степени свободы и может совершать любой поворот вокруг центра подвеса. Гироскоп, у которого центр масс совпадает с центром подвеса, называется уравновешенным, астатическим или свободным. Изучение законов движения классического гироскопа — задача динамики твёрдого тела.
Основной количественной характеристикой ротора механического гироскопа является его вектор собственного кинетического момента, называемого также моментом количества движения или моментом импульса,
где I — момент инерции ротора гироскопа относительно оси собственного вращения, Ω — угловая скорость собственного вращения гироскопа относительно оси симметрии.
Медленное движение вектора собственного кинетического момента гироскопа под действием моментов внешних сил, называемое прецессией гироскопа, описывается уравнением
ω x Η = Μ, (2)
где ω — вектор угловой скорости прецессии, Н — вектор собственного кинетического момента гироскопа, М — ортогональная к Н составляющая вектора момента внешних сил, приложенных к гироскопу.
Момент сил, приложенных со стороны ротора к подшипникам оси собственного вращения ротора, возникающий при изменении направления оси и определяемый уравнением
М g = -М = Η x ω, (3)
называется гироскопическим моментом.
Кроме медленных прецессионных движений ось гироскопа может совершать быстрые колебания с малой амплитудой и высокой частотой — так называемые нутации. Для свободного гироскопа с динамически симметричным ротором в безынерционном подвесе частота нутационных колебаний определяется формулой
где А — момент инерции ротора относительно оси, ортогональной оси собственного вращения и проходящей через центр масс ротора. При наличии сил трения нутационные колебания обычно достаточно быстро затухают.
Погрешность гироскопа измеряется скоростью ухода его оси от первоначального положения. Согласно уравнению (2) величина ухода, называемого также дрейфом, пропорциональна моменту сил М относительно центра подвеса гироскопа:
ω ух = М/Н (4)
Уход ω ух обычно измеряется в угловых градусах в час. Из формулы (4) следует, что свободный гироскоп функционирует идеально лишь в том случае, если внешний момент М равен 0. При этом угловая скорость прецессии обращается в нуль и ось собственного вращения будет в точности совпадать с неизменным направлением в инерциальном пространстве.
Из формулы (4) следует, что свободный гироскоп функционирует идеально лишь в том случае, если внешний момент М равен 0. При этом угловая скорость прецессии обращается в нуль и ось собственного вращения будет в точности совпадать с неизменным направлением в инерциальном пространстве.
Однако на практике любые средства, используемые для подвеса ротора гироскопа, являются причиной возникновения нежелательных внешних моментов неизвестной величины и направления. Формула (4) определяет пути повышения точности механического гироскопа: надо уменьшить «вредный» момент сил М и увеличить кинетический момент Н. При выборе угловой скорости гироскопа необходимо учитывать одно из главных ограничений, связанных с пределами прочности материала ротора из-за возникающих при вращении центробежных сил. При разгоне ротора выше так называемой допускаемой угловой скорости начинается процесс его разрушения.
Лучшие современные гироскопы имеют случайный уход порядка 10 -4 -10 -5 °/ч. Ось гироскопа с погрешностью 10 -5 °/ч совершает полный оборот на 360° за 4 тысячи лет! Точность балансировки гироскопа с погрешностью 10 -5 °/ч должна быть выше одной десятитысячной доли микрометра (10 -10 м), то есть смещение центра масс ротора из центра подвеса не должно превышать величину порядка диаметра атома водорода.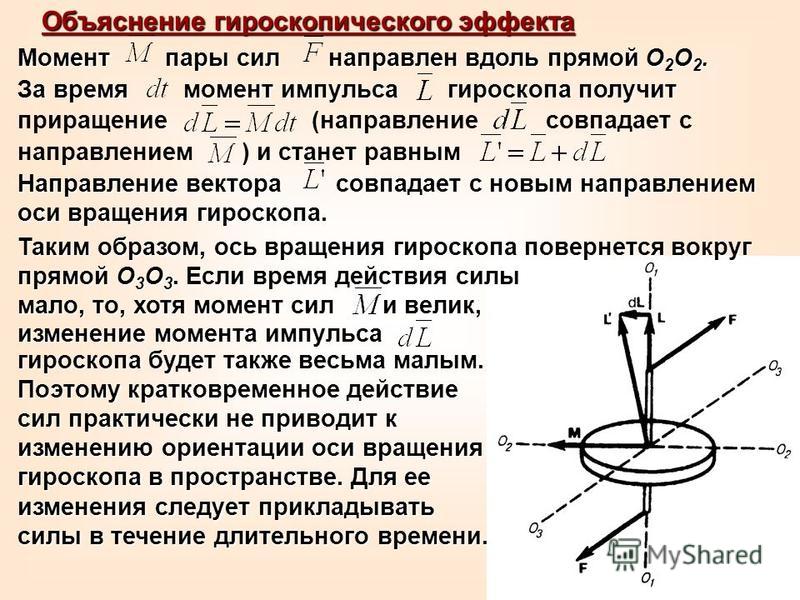
Гироскопические устройства можно разделить на силовые и измерительные. Силовые устройства служат для создания моментов сил, приложенных к основанию, на котором установлен гироскопический прибор; измерительные предназначены для определения параметров движения основания (измеряемыми параметрами могут быть углы поворота основания, проекции вектора угловой скорости и тому подобное).
Впервые уравновешенный гироскоп нашёл практическое применение в 1898 году в приборе для стабилизации курса торпеды, изобретённом австрийским инженером Л. Обри. Аналогичные приборы в различных вариантах исполнения начали использовать в 1920-х годах на самолётах для указания курса (гироскоп направления, гирополукомпасы), а позднее для управления движением ракет. На рисунке 3 показан пример применения гироскопа с тремя степенями свободы в авиационном указателе курса (гирополукомпасе). Вращение ротора в шарикоподшипниках создаётся и поддерживается струёй сжатого воздуха, направленной на рифлёную поверхность обода.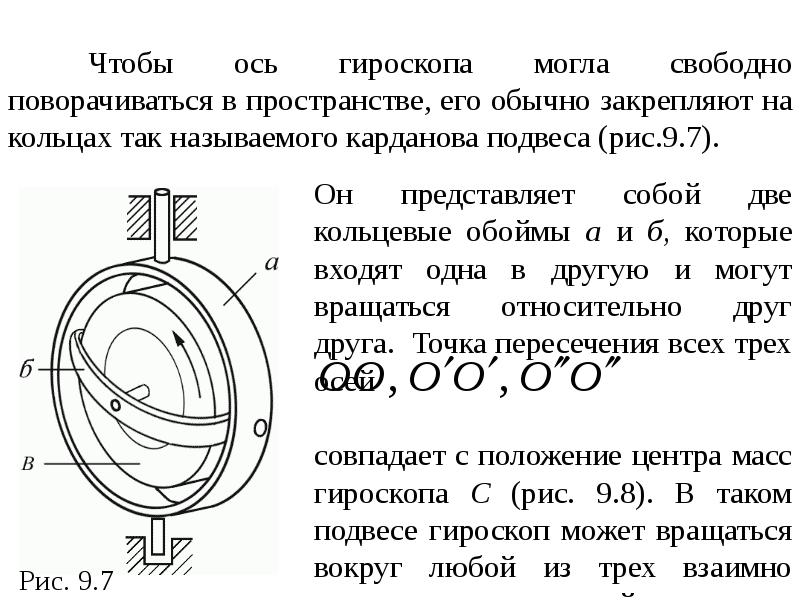 По шкале азимута, прикреплённой к наружной рамке, можно, установив ось собственного вращения ротора параллельно плоскости основания прибора, ввести требуемое значение азимута. Трение в подшипниках незначительно, поэтому ось вращения ротора сохраняет заданное положение в пространстве. Пользуясь стрелкой, скреплённой с основанием, по шкале азимута можно контролировать поворот самолёта.
По шкале азимута, прикреплённой к наружной рамке, можно, установив ось собственного вращения ротора параллельно плоскости основания прибора, ввести требуемое значение азимута. Трение в подшипниках незначительно, поэтому ось вращения ротора сохраняет заданное положение в пространстве. Пользуясь стрелкой, скреплённой с основанием, по шкале азимута можно контролировать поворот самолёта.
Гирогоризонт, или искусственный горизонт, позволяющий пилоту поддерживать свой самолёт в горизонтальном положении, когда естественный горизонт не виден, основан на использовании гироскопа с вертикальной осью вращения, сохраняющей своё направление при наклонах самолёта. В автопилотах применяются два гироскопа с горизонтальной и вертикальной осями вращения; первый служит для сохранения курса самолёта и управляет вертикальными рулями, второй — для сохранения горизонтального положения самолёта и управляет горизонтальными рулями.
С помощью гироскопа созданы автономные инерциальные навигационные системы (ИНС), предназначенные для определения координат, скорости и ориентации подвижного объекта (корабля, самолёта, космического аппарата и тому подобное) без использования какой-либо внешней информации. В состав ИНС кроме гироскопа входят акселерометры, предназначенные для измерения ускорения (перегрузки) объекта, а также компьютер, интегрирующий по времени выходные сигналы акселерометров и выдающий навигационную информацию с учётом показания гироскопа. К началу 21 века созданы настолько точные ИНС, что дальнейшего повышения точностей для решения многих задач уже не требуется.
В состав ИНС кроме гироскопа входят акселерометры, предназначенные для измерения ускорения (перегрузки) объекта, а также компьютер, интегрирующий по времени выходные сигналы акселерометров и выдающий навигационную информацию с учётом показания гироскопа. К началу 21 века созданы настолько точные ИНС, что дальнейшего повышения точностей для решения многих задач уже не требуется.
Развитие гироскопической техники последних десятилетий сосредоточилось на поиске нетрадиционных областей применения гироскопических приборов — разведка полезных ископаемых, предсказание землетрясений, сверхточное измерение координат железнодорожных путей и нефтепроводов, медицинская техника и многое другое.
Неклассические виды гироскопов. Высокие требования к точности и эксплутационным характеристикам гироскопических приборов привели не только к дальнейшим усовершенствованиям классического гироскопа с вращающимся ротором, но и к поискам принципиально новых идей, позволяющих решить проблему создания чувствительных датчиков для индикации и измерения угловых движений объекта в пространстве.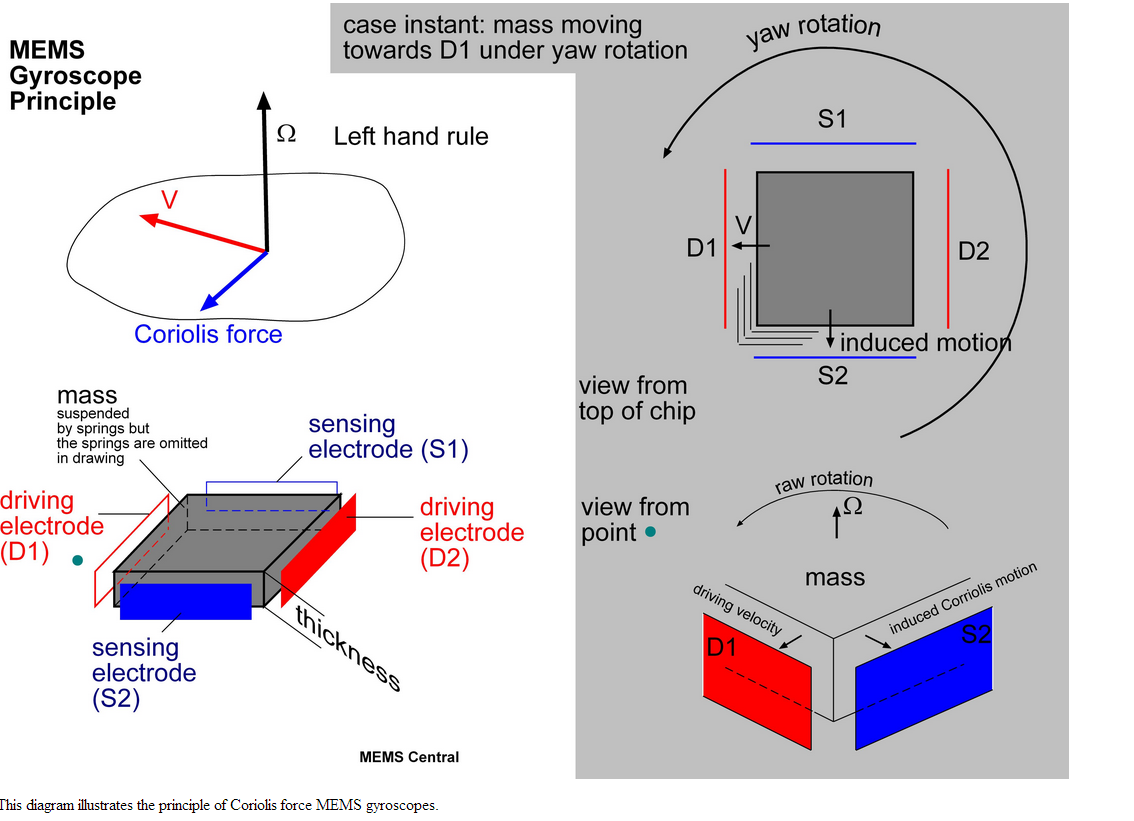 Этому способствовали успехи квантовой электроники, ядерной физики и других областей точных наук.
Этому способствовали успехи квантовой электроники, ядерной физики и других областей точных наук.
В гироскопе с воздушной опорой шариковые подшипники, используемые в традиционном кардановом подвесе, заменены «газовой подушкой» (газодинамической опорой). Это полностью устранило износ материала опор во время работы и позволило почти неограниченно увеличить время службы прибора. К недостаткам газовых опор относятся довольно большие потери энергии и возможность внезапного отказа при случайном контакте ротора с поверхностью опоры.
Поплавковый гироскоп представляет собой роторный гироскоп, в котором для разгрузки подшипников подвеса все подвижные элементы взвешиваются в жидкости с большой плотностью так, чтобы вес ротора вместе с кожухом уравновешивался гидростатическими силами. Благодаря этому на много порядков снижается сухое трение в осях подвеса и увеличивается ударная и вибрационная стойкость прибора. Герметичный кожух, выполняющий роль внутренней рамки карданового подвеса, называется поплавком. Ротор гироскопа внутри поплавка вращается на воздушной подушке в аэродинамических подшипниках со скоростью порядка 30-60 тысяч оборотов в минуту. Для повышения точности прибора необходимо использование системы термостабилизации. Поплавковый гироскоп с большим вязким трением жидкости называется также интегрирующим гироскопом.
Ротор гироскопа внутри поплавка вращается на воздушной подушке в аэродинамических подшипниках со скоростью порядка 30-60 тысяч оборотов в минуту. Для повышения точности прибора необходимо использование системы термостабилизации. Поплавковый гироскоп с большим вязким трением жидкости называется также интегрирующим гироскопом.
Динамически настраиваемый гироскоп (ДНГ) принадлежит к классу гироскопа с упругим подвесом ротора, в которых свобода угловых движений оси собственного вращения обеспечивается за счёт упругой податливости конструктивных элементов (например, торсионов). В ДНГ, в отличие от классического гироскопа, используется так называемый внутренних карданов подвес (рис. 4), образованный внутренним кольцом 2, которое изнутри крепится торсионами 4 к валу электродвигателя 5, а снаружи — торсионами 3 к ротору 1. Момент трения в подвесе проявляется только в результате внутреннего трения в материале упругих торсионов. В ДНГ за счёт подбора моментов инерции рамок подвеса и угловой скорости вращения ротора осуществляется компенсация упругих моментов подвеса, приложенных к ротору. К достоинствам ДНГ относятся их миниатюрность, отсутствие подшипников со специфическими моментами трения, присутствующими в классическом кардановом подвесе, высокая стабильность показаний, относительно невысокая стоимость.
К достоинствам ДНГ относятся их миниатюрность, отсутствие подшипников со специфическими моментами трения, присутствующими в классическом кардановом подвесе, высокая стабильность показаний, относительно невысокая стоимость.
Рис. 4. Динамически настраиваемый гироскоп с внутренним кардановым подвесом: 1 — ротор; 2 — внутреннее кольцо; 3 и 4 — торсионы; 5 — электродвигатель.
Кольцевой лазерный гироскоп (КЛГ), называемый также квантовым гироскопом, создан на основе лазера с кольцевым резонатором, в котором по замкнутому оптическому контуру одновременно распространяются встречные электромагнитные волны. К достоинствам КЛГ относятся отсутствие вращающегося ротора, подшипников, подверженных действию сил трения, высокая точность.
Волоконно-оптический гироскоп (ВОГ) представляет собой волоконно-оптический интерферометр, в котором распространяются встречные электромагнитные волны. ВОГ является аналоговым преобразователем угловой скорости вращения основания, на котором он установлен, в выходной электрической сигнал.
Волновой твердотельный гироскоп (ВТГ) основан на использовании инертных свойств упругих волн в твёрдом теле. Упругая волна может распространяться в сплошной среде, не изменяя своей конфигурации. Если возбудить стоячие волны упругих колебаний в осесимметричном резонаторе, то вращение основания, на котором установлен резонатор, вызывает поворот стоячей волны на меньший, но известный угол. Соответствующее движение волны как целого называется прецессией. Скорость прецессии стоячей волны пропорциональна проекции угловой скорости вращения основания на ось симметрии резонатора. К достоинствам ВТГ относятся: высокое отношение точность/цена; способность переносить большие перегрузки, компактность и небольшая масса, низкая энергоёмкость, малое время готовности, слабая зависимость от температуры окружающей среды.
Вибрационный гироскоп (ВГ) основан на свойстве камертона сохранять плоскость колебаний своих ножек. В ножке колеблющегося камертона, установленного на платформе, вращающейся вокруг оси симметрии камертона, возникает периодических момент сил, частота которого равна частоте колебания ножек, а амплитуда пропорциональна угловой скорости вращения платформы. Поэтому, измеряя амплитуду угла закрутки ножки камертона, можно судить об угловой скорости платформы. К недостаткам ВГ относится нестабильность показаний из-за сложностей высокоточного измерения амплитуды колебаний ножек, а также то, что они не работают в условиях вибрации, которая практически всегда сопровождает места установки приборов на движущихся объектах. Идея камертонного гироскопа стимулировала целое направление поисков новых типов гироскопов, использующих пьезоэлектрический эффект либо вибрацию жидкостей или газов в специально изогнутых трубках и тому подобное.
Поэтому, измеряя амплитуду угла закрутки ножки камертона, можно судить об угловой скорости платформы. К недостаткам ВГ относится нестабильность показаний из-за сложностей высокоточного измерения амплитуды колебаний ножек, а также то, что они не работают в условиях вибрации, которая практически всегда сопровождает места установки приборов на движущихся объектах. Идея камертонного гироскопа стимулировала целое направление поисков новых типов гироскопов, использующих пьезоэлектрический эффект либо вибрацию жидкостей или газов в специально изогнутых трубках и тому подобное.
Микромеханический гироскоп (ММГ) относится к гироскопам низких точностей (ниже 10 -1 °/ч). Эта область традиционно считалась малоперспективной для задач управления движущимися объектами и навигации. Но в конце 20 века разработка ММГ стала одним из наиболее интенсивно разрабатываемых направлений гироскопической техники, тесно связанным с современными кремниевыми технологиями. ММГ представляет собой своеобразный электронный чип с кварцевой подложкой площадью в несколько квадратных миллиметров, на которую методом фотолитографии наносится плоский вибратор типа камертона. Точность современных ММГ невелика и достигает 10 1 -10 2 °/ч, однако решающее значение имеет исключительно низкая стоимость микромеханических чувствительных элементов. Благодаря использованию хорошо отработанных современных технологий массового производства микроэлектроники открывается возможность применения ММГ в совершенно новых областях: автомобили и бинокли, телескопы и видеокамеры, мыши и джойстики персональных компьютеров, мобильные робототехнические устройства и даже детские игрушки.
Точность современных ММГ невелика и достигает 10 1 -10 2 °/ч, однако решающее значение имеет исключительно низкая стоимость микромеханических чувствительных элементов. Благодаря использованию хорошо отработанных современных технологий массового производства микроэлектроники открывается возможность применения ММГ в совершенно новых областях: автомобили и бинокли, телескопы и видеокамеры, мыши и джойстики персональных компьютеров, мобильные робототехнические устройства и даже детские игрушки.
Неконтактный гироскоп относится к гироскопическим устройствам сверхвысоких точностей (10 -6 -5·10 -4 °/ч). Разработка гироскопа с неконтактными подвесами началась в середине 20 века. В неконтактных подвесах реализуется состояние левитации, т. е. состояние, при котором ротор гироскопа «парит» в силовом поле подвеса без какого-либо механического контакта с окружающими телами. Среди неконтактных гироскопов выделяют гироскопы с электростатическим, магнитным и криогенным подвесами ротора. В электростатическом гироскопе проводящий бериллиевый сферический ротор подвешен в вакуумированной полости в регулируемом электрическом поле, создаваемом системой электродов. В криогенном гироскопе сверхпроводящий ниобиевый сферический ротор подвешен в магнитном поле; рабочий объём гироскопа охлаждается до сверхнизких температур, так, чтобы ротор перешёл в сверхпроводящее состояние. Гироскоп с магниторезонансным подвесом ротора является аналогом гироскопа с электростатическим подвесом ротора, в котором электрическое поле заменено магнитным, а бериллиевый ротор — ферритовым. Современные гироскопы с неконтактными подвесами — это сложнейшие приборы, которые вобрали в себя новейшие достижения техники.
В криогенном гироскопе сверхпроводящий ниобиевый сферический ротор подвешен в магнитном поле; рабочий объём гироскопа охлаждается до сверхнизких температур, так, чтобы ротор перешёл в сверхпроводящее состояние. Гироскоп с магниторезонансным подвесом ротора является аналогом гироскопа с электростатическим подвесом ротора, в котором электрическое поле заменено магнитным, а бериллиевый ротор — ферритовым. Современные гироскопы с неконтактными подвесами — это сложнейшие приборы, которые вобрали в себя новейшие достижения техники.
Кроме перечисленных выше типов гироскопов проводились и проводятся работы над экзотическими типами гироскопа, такими, как ионный гироскоп, ядерный гироскоп и др.
Математические задачи в теории гироскопа. Математические основы теории гироскопа заложены Л. Эйлером в 1765 году в его работе «Theoria motus corporum solidorum sue rigidorum». Движение классического гироскопа описывается системой дифференциальных уравнений 6-го порядка, решение которой стало одной из самых знаменитых математических задач. Эта задача относится к разделу теории вращательного движения твёрдого тела и является обобщением задач, решаемых до конца простыми средствами классического анализа. Однако при этом она настолько трудна, что ещё далека от завершения, несмотря на результаты, полученные крупнейшими математиками 18-20 века. Современные гироскопические приборы потребовали решения новых математических задач. Движение неконтактных гироскопов с высокой точностью подчиняется законам механики, поэтому, решая уравнения движения гироскопа с помощью компьютера, можно точно предсказывать положение оси гироскопа в пространстве. Благодаря этому разработчикам неконтактных гироскопов не приходится балансировать ротор с точностью 10 -10 м, которую невозможно достичь при современном уровне технологии. Достаточно точно измерять погрешности изготовления ротора данного гироскопа и вводить соответствующие поправки в программы обработки сигналов гироскопа. Получающиеся с учётом этих поправок уравнения движения гироскопа оказываются очень сложными, и для их решения приходится применять весьма мощные компьютеры, использующие алгоритмы, основанные на последних достижениях математики.
Эта задача относится к разделу теории вращательного движения твёрдого тела и является обобщением задач, решаемых до конца простыми средствами классического анализа. Однако при этом она настолько трудна, что ещё далека от завершения, несмотря на результаты, полученные крупнейшими математиками 18-20 века. Современные гироскопические приборы потребовали решения новых математических задач. Движение неконтактных гироскопов с высокой точностью подчиняется законам механики, поэтому, решая уравнения движения гироскопа с помощью компьютера, можно точно предсказывать положение оси гироскопа в пространстве. Благодаря этому разработчикам неконтактных гироскопов не приходится балансировать ротор с точностью 10 -10 м, которую невозможно достичь при современном уровне технологии. Достаточно точно измерять погрешности изготовления ротора данного гироскопа и вводить соответствующие поправки в программы обработки сигналов гироскопа. Получающиеся с учётом этих поправок уравнения движения гироскопа оказываются очень сложными, и для их решения приходится применять весьма мощные компьютеры, использующие алгоритмы, основанные на последних достижениях математики.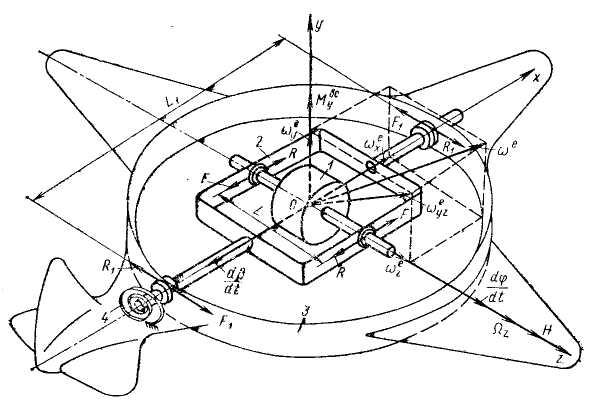 Разработка программ расчёта движения гироскопа с неконтактными подвесами позволяет существенно повысить точность гироскопа, а следовательно, и точность определения местоположения объекта, на котором установлены эти гироскопы.
Разработка программ расчёта движения гироскопа с неконтактными подвесами позволяет существенно повысить точность гироскопа, а следовательно, и точность определения местоположения объекта, на котором установлены эти гироскопы.
Лит.: Магнус К. Гироскоп. Теория и применение. М., 1974; Ишлинский А. Ю. Ориентация, гироскопы и инерциальная навигация. М., 1976; Климов Д. М., Харламов С. А. Динамика гироскопа в кардановом подвесе. М., 1978; Ишлинский А. Ю., Борзов В. И., Степаненко Н. П. Лекции по теории гироскопов. М., 1983; Новиков Л. З., Шаталов М. Ю. Механика динамически настраиваемых гироскопов. М., 1985; Журавлев В. Ф., Климов Д. М. Волновой твердотельный гироскоп. М., 1985; Мартыненко Ю. Г. Движение твердого тела в электрических и магнитных полях. М., 1988.
Современные смартфоны оснащены множеством датчиков, которые не только садят аккумулятор, но и постоянно отслеживают состояние телефона и делают пользование им значительно удобнее. Сегодня мы разберёмся с таким датчиком,
как гироскоп в телефоне, что это
, зачем он нужен и где пригождается.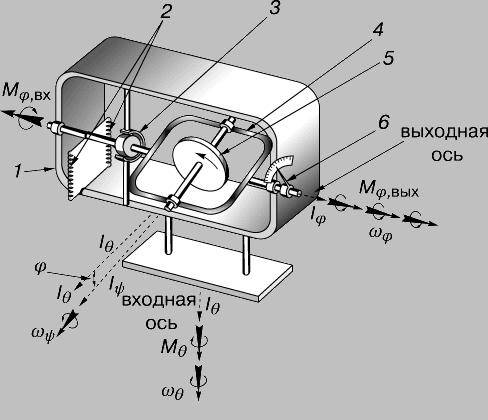
Немного истории
Самым примитивным примером гироскопа может стать детский волчок или юла. Именно они наглядно визуализируют принцип действия датчика.
Общественности прибор был впервые представлен немецким учёным в области математики и астрономии И. Боненбергером. Хотя в некоторых научных документах указано, что на самом деле изобретение было сделано тремя годами раньше.
Первая компания, которая применила датчик в своём устройстве, Apple. Именно iPhone первыми смогли похвастаться подобным оснащением. Сегодня почти каждый имеет гироскоп. Уточнить его наличие можно в технической документации к устройству. Как правило, в характеристиках устройства в разделе датчиков находится полная информация о наличии приборов. Если по каким-то причинам кажется, что информация недостоверная можно установить дополнительный софт, например, Sensor Box for Android. Программа показывает .
Гироскоп в телефоне, что это?
Фактически это специальный чип, расположенный внутри устройства.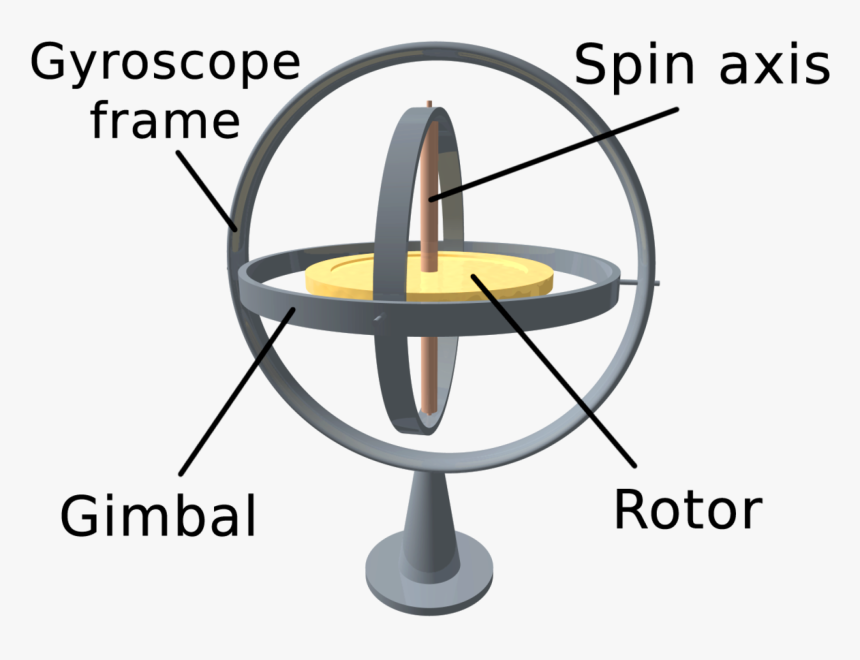 Чтобы его увидеть придётся разобрать смартфон, так как он скрыт от глаз пользователей. Он распознает и анализирует положение гаджета в окружающем пространстве и вычисляет углы его размещения.
Чтобы его увидеть придётся разобрать смартфон, так как он скрыт от глаз пользователей. Он распознает и анализирует положение гаджета в окружающем пространстве и вычисляет углы его размещения.
Помимо смартфонов, подобные датчики успешно зарекомендовали себя и в других сферах деятельности человека: авиация, судоходство, космонавтика. Также можно встретить подобные датчики в некоторых приборах и бытовой технике.
Функции гироскопа в смартфоне
Внедрение технологии позволило реализовать новые возможности для мобильных устройств. Разберёмся что именно берёт на себя гироскоп и какие функции выполняет в современных гаджетах.
Технология помогает ориентироваться на местности с большей точностью. Исходя из описанных функций, гироскоп удобная и нужная в смартфоне вещь.
Есть, конечно, и некоторые нюансы, портящие впечатление от пользования датчиком. Ряд приложений могут потерять часть быстродействия и медленнее реагировать на команды пользователя при включённом гироскопе. Также может наблюдаться ненужный отклик датчика, например, когда владелец смартфона лёжа читает книгу и переворачивается на другой бок. Но это погрешности незначительны и устраняются путём временного отключения датчика.
Также может наблюдаться ненужный отклик датчика, например, когда владелец смартфона лёжа читает книгу и переворачивается на другой бок. Но это погрешности незначительны и устраняются путём временного отключения датчика.
Многие, отвечая на вопрос, гироскоп в телефоне, что это , искренне полагают, будто он и акселерометр — это либо идентичные устройства, либо вовсе разные названия одной технологии. На самом деле оба этих суждения ложны. Эти датчики фиксируют положение смартфона в пространстве, но в разных плоскостях. Акселерометр призван отследить повороты, гироскоп же имеет значительно больше возможностей:
- не только повороты, но и перемещение устройства в пространстве;
- определение сторон света, то есть функции компаса;
- скорость перемещения в пространстве.
То есть гироскоп фиксирует перемещения прибора сразу в трёх плоскостях. Отсюда и большие возможности смартфонов, оснащённых датчиком. А если устройство совмещает оба прибора, то это делает его ещё более функциональным.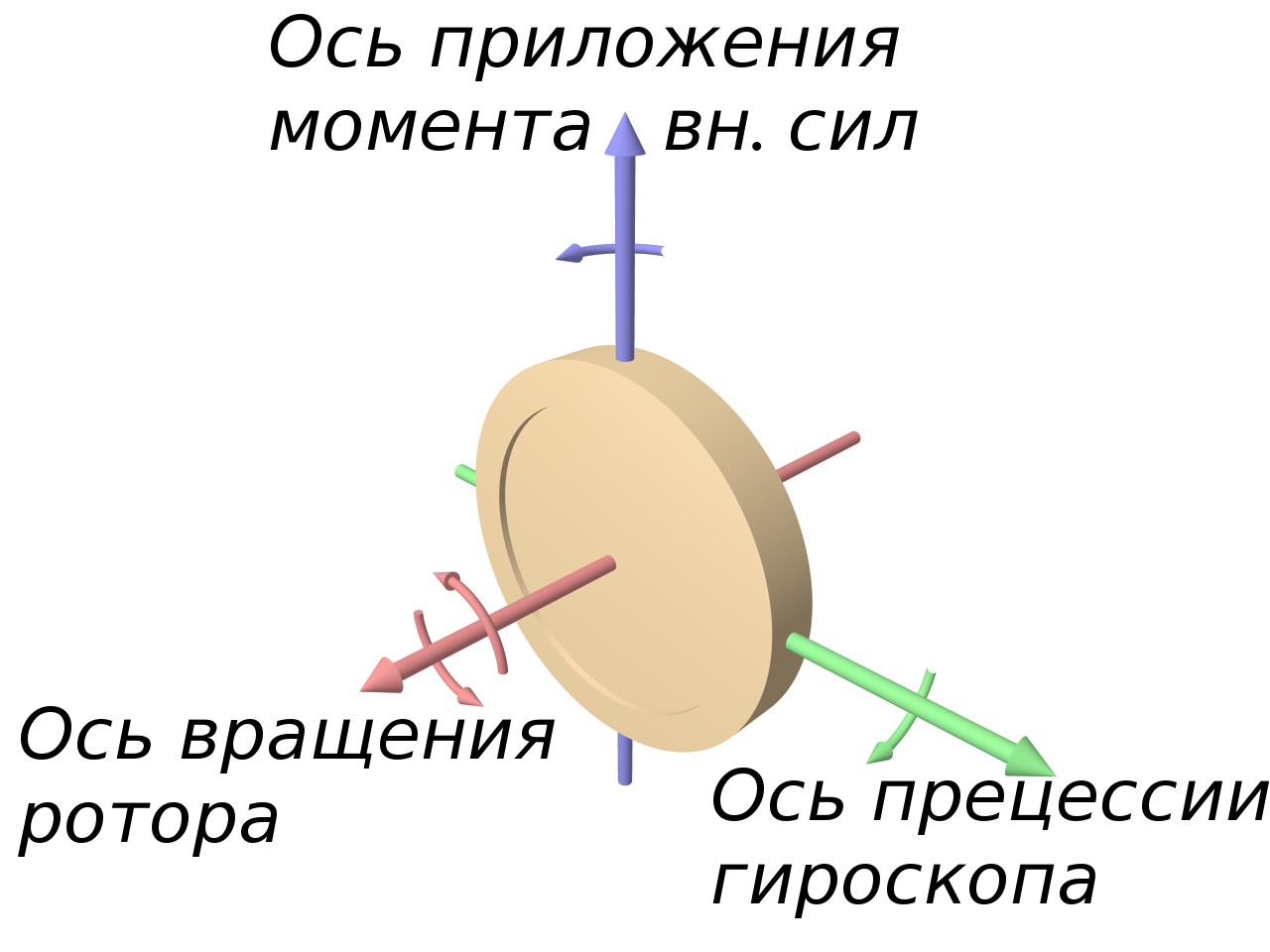
Где чаще используется
Итак, мы немного разобрались с вопросом, что такое гироскоп в телефоне . Теперь постараемся наглядно привести примеры его наиболее частого использования.
По статистике, на практике устройство, оснащённое гироскопом, приходится по душе любителям поиграть в мобильные игры. Гироскоп меняет принцип игры в лучшую сторону. Помимо того, что картинка получается более качественной, а сам процесс игры интерактивным и захватывающим. Если раньше для смены положения персонажа приходилось водить пальцами по экрану и нажимать на определённые зоны, то сейчас достаточно повернуть в пространстве сам гаджет, датчик захватит положение и интерпретирует его в игре. В зависимости от угла поворота смартфона сменяется и угол поворота персонажа. В итоге получается почти виртуальная реальность. В шутерах гироскоп очень удобен для прицела. Также датчик активно используется в различных симуляторах.
Ещё одна категория пользователей, которая не обошла датчик стороной – представители усложнённых профессий, в которых требуется точный расчёт и измерения.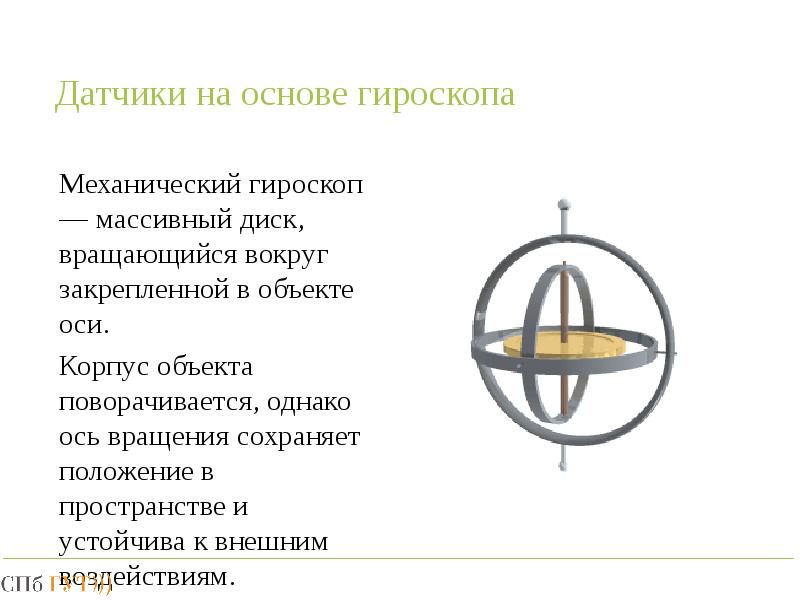 Например, автослесарь может определить расположение детали, просто приложив к ней телефон. В строительной отрасли таким же образом отслеживаются несущие конструкции на предмет ровного расположения. При этом информация о градусе наклона выводится прямо на экран смартфона и отличается удивительной точностью.
Например, автослесарь может определить расположение детали, просто приложив к ней телефон. В строительной отрасли таким же образом отслеживаются несущие конструкции на предмет ровного расположения. При этом информация о градусе наклона выводится прямо на экран смартфона и отличается удивительной точностью.
В качестве вывода, хочется отметить, что гироскоп – очень удобное и практичное изобретение. Благодаря ему мобильные устройства имеют значительно больше доступных возможностей, которые облегчают и упрощают их использование. Телефон, оснащённый датчиком способен выступать в качестве измерительного прибора, навигатора, компаса и т. д. Также позволяет выполнять частичное управление системой, не касаясь экрана, особенно удобно последнее в период зимы, когда не очень хочется снимать варежки, чтобы ответить на звонок или сменить текущую мелодию. Кроме того, производители постоянно сокращают энергозатратность датчика, что позволяет использовать его без заметного расхода заряда аккумулятора.
Что такое гироскоп в телефоне и для чего он нужен. Гироскопы на радиоуправляемых моделях
Мобильные телефоны с каждым годом становятся сложнее. Чтобы пересчитать количество всех датчиков, встроенных в современные смартфоны, может не хватить пальцев обеих рук. Гироскоп в телефоне – что это за сенсор, как он работает, каково его применение, можно ли отключить этот прибор? Эти вопросы будут рассмотрены для тех, кто хочет хорошо разбираться в своем смартфоне.
Что такое гироскоп
Юла, она же волчок – известная игрушка. Она при быстром вращении сохраняет устойчивость на одной точке опоры. Это незамысловатое устройство является простейшим примером гироскопа – приспособления, реагирующего на изменения углов ориентации тела, на котором оно установлено, в трех плоскостях. Термин впервые использовал французский физик и математик Жан Фуко.
Гироскопы классифицируют по количеству степеней свободы и по принципу действия (механические и оптические). Вибрационные гиродатчики, подвид механических, широко используются в мобильных устройствах. Применение GPS-навигации отодвинуло на второй план изначальную функцию гироскопов – помощь при ориентации на местности, но эта технология все еще незаменима в современных моделях телефонов.
Применение GPS-навигации отодвинуло на второй план изначальную функцию гироскопов – помощь при ориентации на местности, но эта технология все еще незаменима в современных моделях телефонов.
Отличие от акселерометра
На современных мобильных гаджетах часто установлены оба эти прибора. Ключевое отличие гироскопа от акселерометра и других сенсоров заключается в самом принципе работы данных аппаратов. Первый определяет собственный угол наклона относительно земли, а второй способен измерять линейное ускорение. Преимущество акселерометра – знание ускорения позволяет точно вычислить расстояние, на которое было перемещено устройство.
На практике оба прибора могут как заменять, так и дополнять друг друга. Фактически и тот, и тот лишь регистрируют положение относительно земной поверхности. Как и гироскоп, акселерометр может передавать сведения об ускорении смартфону, на который он установлен.Часто используются оба датчика; они хорошо взаимодействуют. В таблице зафиксированы ключевые особенности приборов.
Принцип работы
Простыми словами, гироскоп – это волчок, быстро вращающийся вокруг вертикальной оси, закрепленный на раме, которая способна поворачиваться вокруг горизонтальной оси, и закреплена на другой раме, которая поворачивается вокруг третьей оси. Как бы мы ни поворачивали волчок, он всегда имеет возможность все равно находиться в вертикальном положении. Датчики снимают сигнал, как волчок ориентирован относительно рам, а процессор получает информацию и считывает с высокой точностью, как рамы в этом случае должны быть расположены относительно силы тяжести.
Что такое гироскоп в смартфоне
Современные мобильные устройства в большинстве своем оснащены гироскопами. Их еще называют гиродатчиками. Этот элемент смартфона работает на постоянной основе, автономно, не требует калибровки. Этот прибор не нужно включать, но в некоторых телефонах есть функция отключения с целью экономии энергии. Выполнен он в виде микроэлектромеханической схемы, расположенной под корпусом смартфона.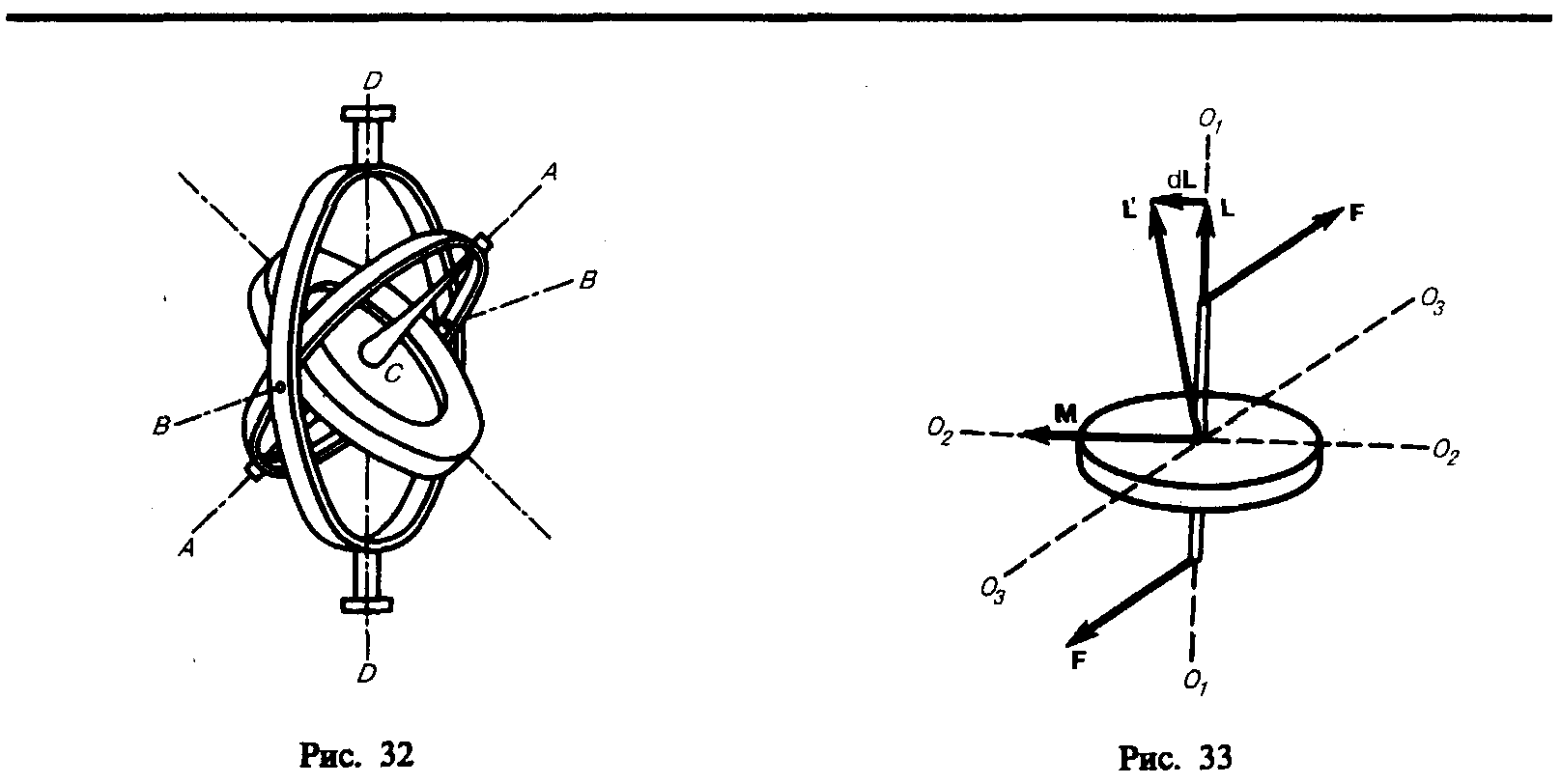
Для чего нужен
Внедрение технологии гиродачиков в мобильные девайсы существенно расширило их функционал и добавило новый способ управления устройствами. Например, простое встряхивание телефона позволит ответить на входящий звонок. Изменение ориентации экрана с помощью наклонов смартфона тоже реализовано благодаря гиродатчикам; этот прибор обеспечивает стабилизацию камеры. В приложении «Калькулятор» простой поворот экрана на 90 градусов открывает дополнительные функции программы.
Гиродатчик очень упростил пользование встроенными в смартфон картами. Если человек повернет свой девайс «лицом» к, скажем, конкретной улице, то это отобразится на карте с высокой точностью. Хороший смартфон с гироскопом обеспечивает пару интересных возможностей для мобильного гейминга. Управление виртуальным автомобилем становится невероятно реалистичным, когда для вождения машины используются повороты смартфона. В технологиях виртуальной реальности с помощью гиродатчиков отслеживаются повороты головы.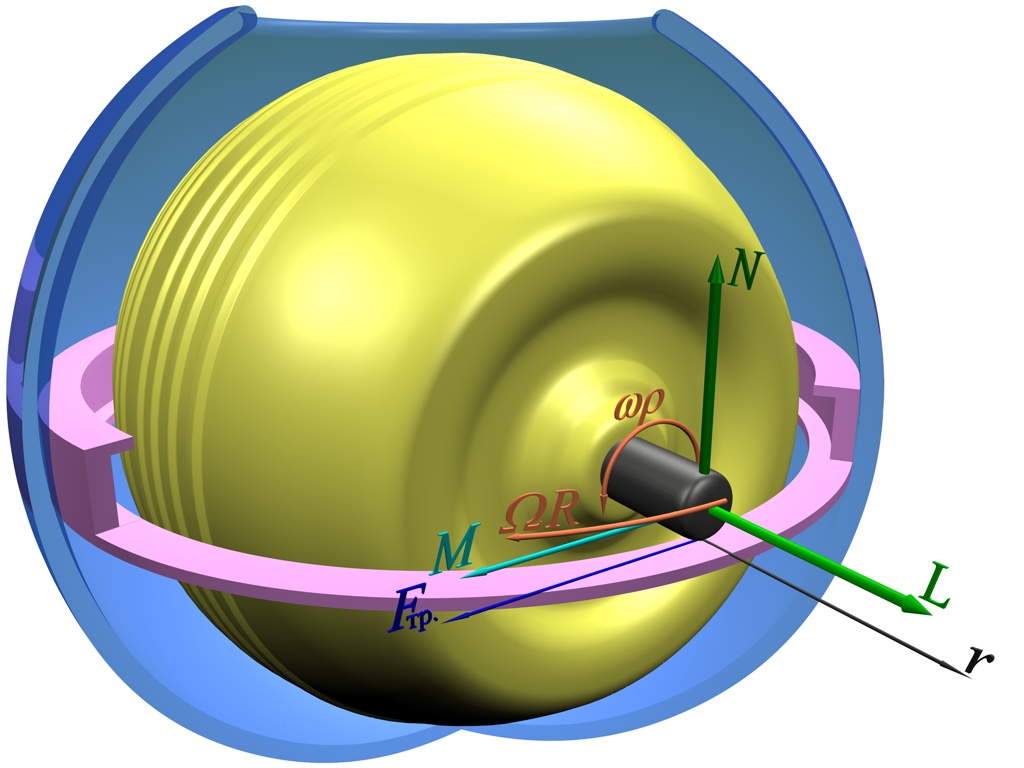
Как работает гироскопический датчик
В гиродатчике есть две массы, двигающиеся в противоположных направлениях. Когда появляется угловая скорость, на массу действует сила Кориолиса, направленная перпендикулярно их движению. Происходит смещение масс на величину, пропорциональную прикладываемой скорости. Меняется расстояние между подвижными и неподвижными электродами, что приводит к изменению емкости конденсатора и напряжению на его обкладках, а это уже электрический сигнал. Такие электронные сигналы и распознаются гиродатчиком.
Как узнать, есть ли гироскоп в смартфоне
Простой способ – ознакомиться с характеристиками девайса на официальном сайте производителя. Если гиродатчик имеется – это обязательно будет указано. Некоторые производители умалчивают о том, есть ли гироскоп на телефоне, не желая тратить на него место. Их можно понять – все сейчас стремятся сделать телефон легче и тоньше. В таких случаях помогут сторонние приложения.
На YouTube есть целый раздел видео, которые можно поворачивать на 360 градусов. Если у вас поддерживается возможность управления таким видео через повороты смартфона, значит работает гироскоп. Еще можно установить приложение AnTuTu Benchmark, которое проводит полную диагностику вашего устройства. Там вы найдете строку о наличии или отсутствии гироскопа.
В каких телефонах есть гироскоп
Первым смартфоном, в котором был установлен гиродатчик, является Iphone 4. Покупатели позитивно отнеслись к такому нововведению и с тех пор телефоны с гироскопом начали заполнять рынок. Все последующие версии смартфонов Apple были оборудованы гиродатчиками. Владельцам андроид-устройств в этом плане немного сложнее, благо, о наличии датчика можно спросить у консультанта перед покупкой, или проверить самому. Гироскоп в телефоне – это важный бонус.
Видео
Сейчас все смартфоны оснащены как минимум одним датчиком, а чаще всего несколькими. Самыми распространенными стали датчики приближения, освещения и движения. Большинство смартфонов оснащены акселерометром, реагирующим на перемещение устройства в двух или максимум в трех плоскостях. Для полноценного взаимодействия с гарнитурой виртуальной реальности нужен гироскоп, который определяет движения в любом направлении.
Для полноценного взаимодействия с гарнитурой виртуальной реальности нужен гироскоп, который определяет движения в любом направлении.
Гироскоп в смартфоне – это микроэлектромеханический преобразователь угловых скоростей в электрический сигнал. Другими словами этот датчик рассчитывает изменение угла наклона относительно оси при повороте устройства.
Гироскоп относится к микроэлектромеханическим системам (МЭМС), которые совмещают в себе механическую и электронную часть. Подобные чипы имеют размеры порядка пары миллиметров или меньше.
Обычный гироскоп состоит из инерционного предмета, который быстро вращается вокруг своей оси. Тем самым он сохраняет свое направление, а смещение контролируемого объекта измеряется по изменению положения подвесов. В смартфоны такой волчок явно не поместиться, вместо него используется МЭМС.
Преобразование механического движения в электрический сигнал
В самом простом одноосевом гироскопе есть две подвижные массы, двигающиеся в противоположных направлениях (на картинке изображены синим цветом). Как только прикладывается внешняя угловая скорость, на массу действует сила Кориолиса, которая направлена перпендикулярно их движению (отмечена оранжевым цветом).
Как только прикладывается внешняя угловая скорость, на массу действует сила Кориолиса, которая направлена перпендикулярно их движению (отмечена оранжевым цветом).
Под действием силы Кориолиса происходит смещение масс на величину пропорциональную прикладываемой скорости. Изменение положения масс меняет расстояние между подвижными электродами (роторами) и неподвижными (статорами), что приводит к изменению емкости конденсатора и соответственно напряжения на его обкладках, а это уже электрический сигнал. Вот такие множественные сигналы и распознаются гироскопом MEMS, определяя направление и скорость движения.
Вычисление ориентации смартфона
Микроконтроллер получает сведения о напряжении и преобразует их в угловую скорость в данный момент. Величину угловой скорости можно определять с заданной точностью, например до 0,001 градусов в секунду. Чтобы определить насколько градусов вокруг оси повернули устройство, необходимо мгновенную скорость умножить на время между двумя показаниями датчика.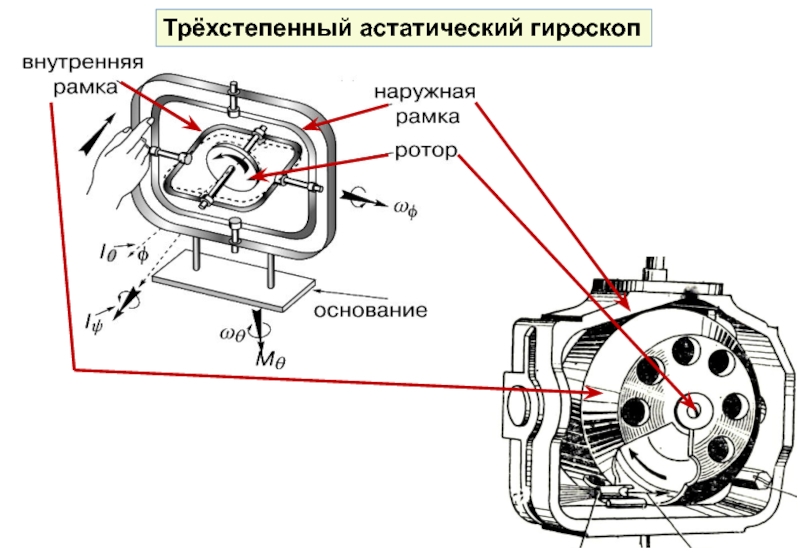 Если использовать трехосевой гироскоп, то получим данные о поворотах относительно всех трех осей, то есть таким образом определить ориентацию смартфона в пространстве.
Если использовать трехосевой гироскоп, то получим данные о поворотах относительно всех трех осей, то есть таким образом определить ориентацию смартфона в пространстве.
Здесь стоит отметить, что для получения значений углов, необходимо интегрировать первоначальные уравнения, в которые входят угловые скорости. При каждом интегрировании увеличивается погрешность. Если вычислять положение только при помощи гироскопа, то со временем рассчитываемые значения станут некорректными.
Поэтому в смартфонах для точного определения ориентации в пространстве необходимы данные еще и акселерометра. Этот датчик измеряет линейное ускорение, но не реагирует на повороты. Оба датчика способны полностью описать все виды движения. Основное преимущество гироскопа над акселерометром в том, что он реагирует на движение в любом направлении.
Зачем нужен гироскоп в смартфоне
Повышенное внимание этому датчику оказывается последние пару лет, когда активно начали развиваться игры и приложения виртуальной реальности. Для взаимодействия пользователя с виртуальной реальностью программе необходимо точно определить положение человека в пространстве. Сейчас даже в самых бюджетных смартфонах установлен акселерометр, но его показания сопровождаются шумами, и датчик не реагирует на повороты и движения в горизонтальной плоскости. Следовательно, для полного погружения в виртуальную реальность в смартфоне обязательно должен быть гироскоп и акселерометр.
Для взаимодействия пользователя с виртуальной реальностью программе необходимо точно определить положение человека в пространстве. Сейчас даже в самых бюджетных смартфонах установлен акселерометр, но его показания сопровождаются шумами, и датчик не реагирует на повороты и движения в горизонтальной плоскости. Следовательно, для полного погружения в виртуальную реальность в смартфоне обязательно должен быть гироскоп и акселерометр.
Как узнать есть ли в смартфоне гироскоп
Обычно в характеристиках смартфона указано, какие в нем есть датчики. Если же вы сомневаетесь в правдивости информации, то помогут специальные программы. Например, Sensor Box for Android показывает информацию о всех встроенных датчиках. Гироскоп в нем обозначен как Gyroscope. Есть и другие способы, которые мы
Привет всем, уважаемые пользователи лучшего мобильного портала Trashbox. Сегодняшняя шестая по счёту статья из рубрики «Как это работает» посвящается гироскопу. Если вам не известно, что это такое — данная статья для вас. Давайте же узнаем, что такое гироскоп и как это работает. Самое интересное под катом .
Давайте же узнаем, что такое гироскоп и как это работает. Самое интересное под катом .
Гироскоп (в переводе значит «вращение» или «смотреть») — устройство, имеющее способность измерения изменения углов ориентации связанного с ним тела относительно инерциальной системы координат. В настоящее время известно два типа гироскопов: механический и оптический. По режиму действия гироскопы делятся на: датчики угловой скорости и указатели направления. Однако, одно устройство может работать одновременно в разных режимах в зависимости от типа управления.
Что касается механических гироскопов, то из них больше всех известен роторный гироскоп — это твёрдое тело, которое быстро вращается и ось которого способна изменять ориентацию в пространстве. Скорость вращения гироскопа при этом существенно превышает скорость поворота оси его вращения. Основным свойством данного гироскопа является способность сохранения в пространстве неизменного направления оси вращения при отсутствии какого-либо воздействия на неё внешних сил. Основная часть роторного гироскопа — быстро-вращающийся ротор, имеющий несколько степеней свободы (осей возможного вращения).
Основная часть роторного гироскопа — быстро-вращающийся ротор, имеющий несколько степеней свободы (осей возможного вращения).
Принцип работы
Принцип работы гироскопа заключается в грузиках, которые вибрируют на плоскости с частотой скорости умноженной на перемещение. При повороте гироскопа возникает так называемое Кориолисово ускорение. Если вы пропускали физику в школе или не знаете, то у всех тел есть единое свойство — при вращении они сохраняют свою ориентацию относительно направления силы тяжести. По сути, гироскоп — это волчок, который вращается вокруг вертикальной оси, закреплённый в раме, которая способна поворачиваться вокруг горизонтальной оси, и в свою очередь закреплена в другой раме, которая может поворачиваться вокруг третьей оси. Таким образом, можно придти к выводу: как бы мы не поворачивали волчок, он всегда имеет возможность всё равно находиться в вертикальном положении. Датчики снимают сигнал, как волчок ориентирован относительно рам, а процессор считывает, как рамы в этом случае должны быть расположены относительно силы тяжести.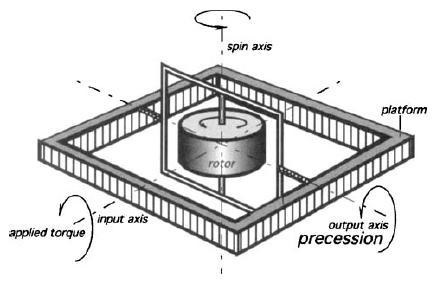
Гироскопы применяются в технике. Они используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас и т. п.), так и в системах ориентации и стабилизации космических аппаратов. Что касается той самой системы стабилизации, то она бывает трёх типов: система силовой стабилизации (используется на двухстепенных гироскопах), система индикаторно-силовой стабилизации (также на двухстепенных гироскопах) и система индикаторной стабилизации (на трёхстепенных гироскопах).
А теперь поподробнее об этих трёх основных типах. Система силовой стабилизации: для стабилизации вокруг каждой оси требуется один гироскоп. Сама стабилизация осуществляется непосредственно гироскопом, а также двигателем разгрузки. В начале действует гироскопический момент, а потом уже подключается двигатель разгрузки. Система индикаторно-силовой стабилизации: для стабилизации также требуется один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент. И последняя — система индикаторной стабилизации: для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
И последняя — система индикаторной стабилизации: для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Использование гироскопа в мобильных устройствах
Давайте же затронем тему использования гироскопа в мобильных устройствах и игровых приставках. В настоящее время в большинстве смартфонов используется так называемый МЭМС-акселерометр. Будучи датчиком ускорения, в покойном состоянии он видит только один вектор — вектор всемирной силы тяготения, который всегда направлен к центру Земли. По разложениям вектора на чувствительные оси датчика без каких-либо затруднений вычисляется угловое положение устройства в пространстве. Также разложение вектора может показать, что датчик неспособен определить разворот устройства по углу курса, то есть поворот влево или вправо при поставленном на ребро смартфоне — проекция вектора на курс всегда равняется нулю. Впервые игровой контроллер, умеющий определять своё положение в пространстве, был выпущен компанией Nintendo — Wii Remote для игровой приставки Wii, и в нём используется только трёхмерный акселерометр.
Кроме того, гироскоп стал применяться и в игровых контроллерах. Например, Sixaxis для SONY PlayStation третьего поколения и Wii MotionPlus для Nintendo Wii. В обоих игровых контроллерах используются два дополняющих друг друга пространственных сенсора: гироскоп, а также акселерометр. Также в новейших контроллерах, кроме акселерометра, используется дополнительный пространственный сенсор — гироскоп. Если привести работу гироскопа в других вещах, то существуют игрушки на основе гироскопа. Самыми банальными примерами являются йо-йо и волчок или в народе его называют «юла». Волчки же отличаются от гироскопов тем, что не имеют ни одной неподвижной точки.
В других сферах также есть применение гироскопу — их целый список. Гироскоп используется в приборах навигации в самолётах и космических аппаратах, в оружии (пуля при стрельбе закручивается, это придаёт ей гораздо большую устойчивость и повышает точность стрельбы), колёса велосипеда или подобного устройства работают как гироскопы — это не даёт ездоку упасть. Таким образом, любой вращающийся предмет можно назвать гироскопом — он противодействует отклонению оси вращения.
Таким образом, любой вращающийся предмет можно назвать гироскопом — он противодействует отклонению оси вращения.
Мобильные персональные компьютеры, одним из которых является , оснащаются огромным количеством функций. Продвинутые пользователи задействуют ресурсы по максимуму, но большинство обладателей планшетов даже не подозревает, какие возможности открывают те или иные составляющие устройства. Возьмем, к примеру, гироскоп в планшете – что это, для чего он необходим, как им пользоваться – знает не каждый.
Функции гироскопа в планшете
Принцип работы гироскопа заключается в том, что эта деталь точно определяет положение устройства в пространстве и измеряет углы поворота. Происходит это за счет установленного в планшете гироскопического датчика. На сегодняшний день гироскопы настолько компактны, что ими оснащаются , телефоны. Нередко гироскоп путают с акселерометром, но это разные составляющие. Основная функция акселерометра – поворот дисплея, поскольку он измеряет угол наклона электронного устройства относительно поверхности планеты. Гироскоп в свою очередь не только определяет положение в пространстве, но и позволяет отслеживать перемещения. Когда акселерометр и гироскоп в планшете задействованы одновременно, достигается наилучшая точность работы.
Гироскоп в свою очередь не только определяет положение в пространстве, но и позволяет отслеживать перемещения. Когда акселерометр и гироскоп в планшете задействованы одновременно, достигается наилучшая точность работы.
Примеры использования гироскопа в планшете
Одна из функций гироскопа – защитная. Так как работает гироскоп, реагируя на изменение положения, он может вовремя подать сигнал о падении устройства. К примеру, такая функция в ноутбуках и некоторых планшетах позволяет моментально зафиксировать жесткий диск и снизить вероятность его повреждения при ударе о поверхность. Также на вопрос, зачем гироскоп в планшете, с энтузиазмом ответит любой игроман. Управление виртуальным рулем гоночного автомобиля или штурвалом самолета стало абсолютно реалистичным с изобретением этого датчика.
Наличие гироскопа позволило по-новому управлять устройством – к примеру, определенный алгоритм резких движений планшетом поможет увеличить или уменьшить громкость звучания, в телефонах с гироскопом можно с помощью движения ответить на звонок и т. д. Кроме того гироскоп может «сотрудничать» с программным обеспечением. Популярный пример – калькулятор, который при повороте из стандартного вертикального положения в горизонтальное превращается из обычного в инженерный, оснащенный дополнительными функциями типа тригонометрических или логарифмических.
д. Кроме того гироскоп может «сотрудничать» с программным обеспечением. Популярный пример – калькулятор, который при повороте из стандартного вертикального положения в горизонтальное превращается из обычного в инженерный, оснащенный дополнительными функциями типа тригонометрических или логарифмических.
Также можно привести в пример бытовое использование гироскопа – он способен наделить планшет функциями строительного уровня. Удобно пользоваться планшетом с гироскопом в качестве навигатора. Карта, благодаря датчику, отображается таким образом, что демонстрирует именно ту местность, которая открывается перед глазами. При повороте вокруг своей оси карта меняет изображение в соответствии с новым обзором.
Есть ли минусы у гироскопа?
Датчик гироскоп реагирует на изменение положения в пространстве, но он не обладает телепатическими способностями. Далеко не всегда на поворот устройства нужна именно такая реакция, которая последует в результате оценки ситуации гироскопом. Элементарный пример – чтение лежа, гироскоп будет поворачивать текст на дисплее в вертикальное положение, в то время как читающему человеку он нужен в горизонтальном.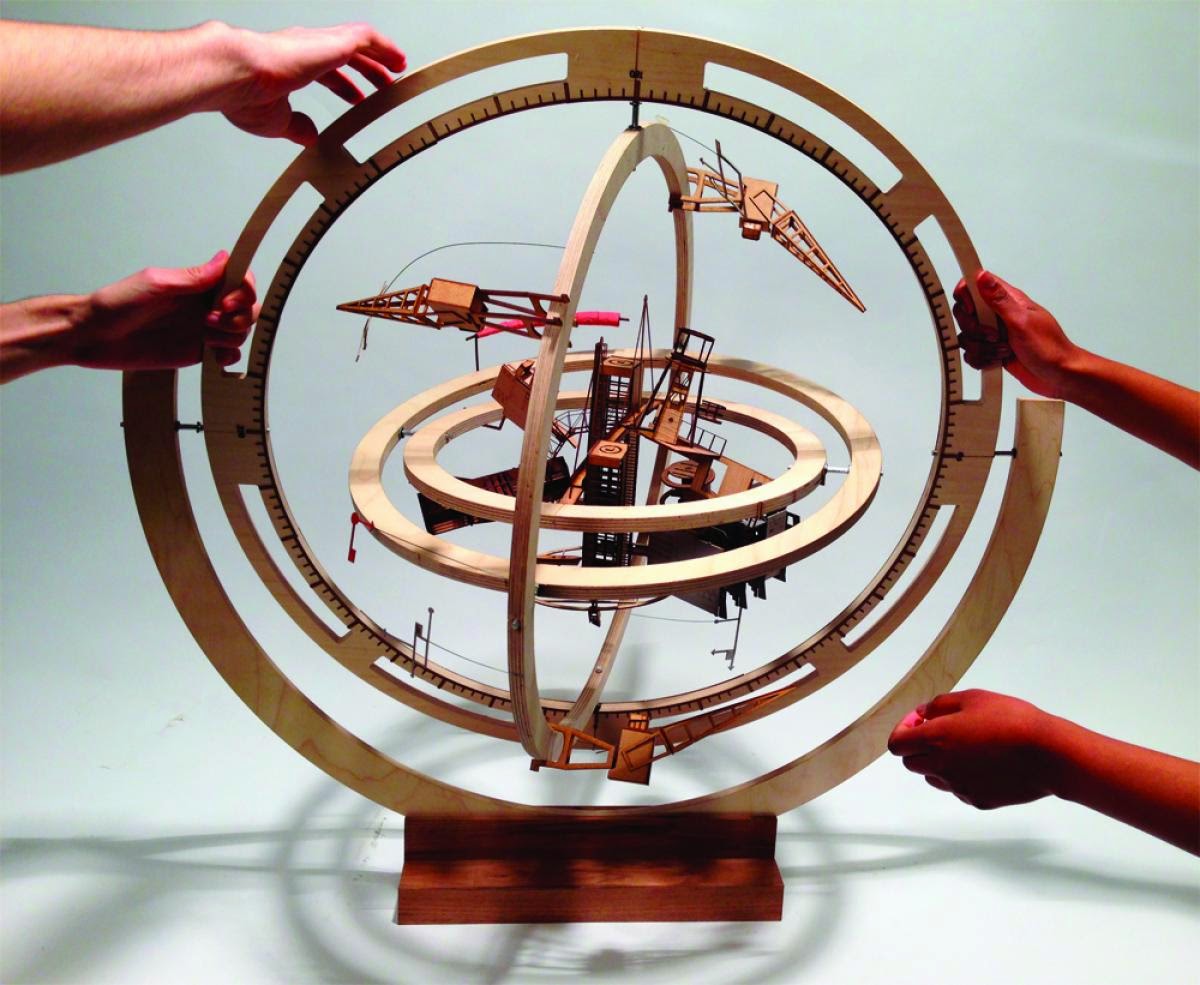 Безусловно, такая ситуация будет раздражать, поэтому при покупке планшета важно убедиться, что в устройстве предусмотрена возможность отключения функции.
Безусловно, такая ситуация будет раздражать, поэтому при покупке планшета важно убедиться, что в устройстве предусмотрена возможность отключения функции.
Неисправная работа гироскопа
Если не работает гироскоп на планшете или работает некорректно, это не повод смириться и отказаться от его использования. Конечно, если проблема аппаратная, придется нести планшет в сервис и вкладывать деньги в ремонт, но дело может быть всего лишь в настройках датчика. Обычно в инструкциях к устройству можно найти подробное описание, как настроить гироскоп на планшете конкретной модели. В большинстве случаев достаточно стандартной калибровки датчика, если результат не достигнут, можно скачать дополнительные приложения.
Что такое гироскопический пульт: назначение, функции, принцип работы
02-04-2021
Классические ПДУ, принцип действия которых основан на передаче инфракрасного импульса в сторону фотоэлемента приемника, были разработаны более 60 лет назад.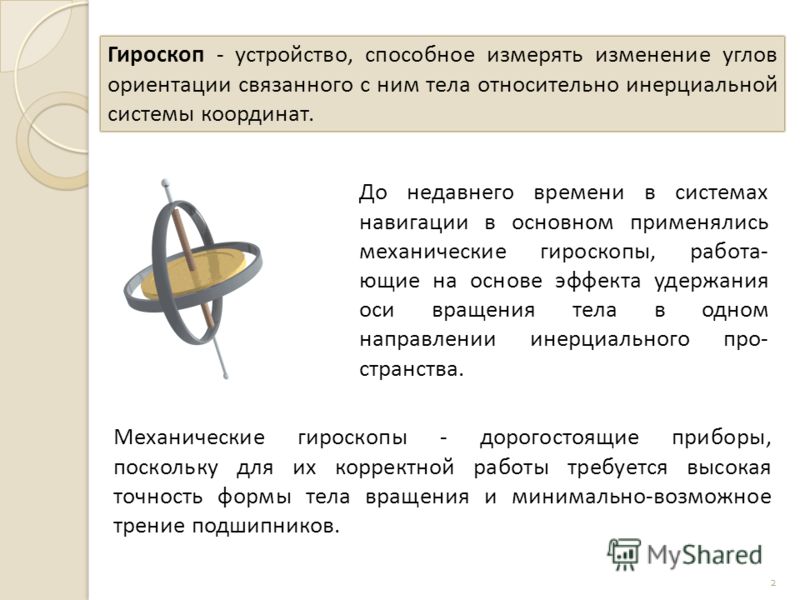 Сама концепция устройства с того времени практически не изменилась. Но любой современный телевизор представляет собой полноценный медиацентр для просмотра видеоконтента. Соответственно, функций и возможностей простого ПДУ уже недостаточно. Так мы подошли к вопросу, что такое гироскопический пульт и зачем он нужен.
Сама концепция устройства с того времени практически не изменилась. Но любой современный телевизор представляет собой полноценный медиацентр для просмотра видеоконтента. Соответственно, функций и возможностей простого ПДУ уже недостаточно. Так мы подошли к вопросу, что такое гироскопический пульт и зачем он нужен.
Что такое пульт с гироскопом
Это отдельный вид ПДУ (второе название – воздушная мышь, air mouse), оснащенный гироскопическим датчиком. С его помощью можно перемещать курсор по экрану телевизора, используя устройство как указку. Основная особенность в том, что такое гироскоп на пульте обеспечивает более быстрое и удобное управление техникой. Принцип действия схож с работой компьютерной мышки, но ее можно использовать только на ровной поверхности.
Преимущество устройства состоит в том, что такой пульт с гироскопом является универсальным девайсом. Данная особенность выделяет air mouse среди других видов ПДУ, в том числе стационарных. Это значит, что пульт мышь гироскопическая может использоваться для управления одновременно:
- смарт ТВ-приставками на базе Android;
- Smart-телевизорами;
- стационарными компьютерами и ноутбуками;
- планшетами;
- проекторами;
- различными устройствами, работающими на базе Windows, Linux, Mac OS, Android.

Любой гироскопический пульт дистанционный характеризуется приятным дизайном и удобной, эргономичной формой. Благодаря вытянутому и гладкому корпусу устройство приятно сидит в руке. В современные ПДУ разработчики внедряют энергосберегающие технологии, позволяющие сохранить заряд элементов питания.
Если перед вами универсальный девайс для управления техникой, и вы не знаете, как определить его тип (стандартный или воздушная мышь), осмотрите устройство. Как правило, если ПДУ оснащен клавиатурой, можно сделать вывод, что это гироскопический пульт. При этом ее наличие не всегда указывает на то, что перед вами air mouse.
Основные функции пульта с гироскопом
Гироскопический пульт это многофункциональное устройство, с помощью которого можно:
- регулировать громкость;
- быстро переключаться между крайними элементами меню;
- одним нажатием клавиши закрыть приложение и вернуться на рабочий стол;
- управлять смарт приставкой;
- выполнять навигацию по элементам меню;
- переписываться с другими пользователями, вводить текст и отправлять аудио-сообщения;
- перелистывать страницы в браузере;
- выключить гироскопический контроллер, чтобы перейти к мануальному управлению и т. д.
 д.
д.Также воздушная мышь может использоваться для игр, предусмотренных в приставках под управлением Android. Выбирая air mouse, нужно учитывать, что это пульт с гироскопом в первую очередь, а не джойстик. Соответственно, такой функциональный ПДУ подойдет не для всех приложений, а только для игр, адаптированных под управление воздушной мышью. Если в гироскопическом устройстве предусмотрен встроенный микрофон, голосовой поиск будет работать только на компьютере или смарт-приставке, но не на телевизоре.
Как работает гироскопический пульт
Пульт air mouse работает несколько иначе по сравнению с классическими ПДУ. Основным элементом устройства является гироскоп. Это специальный датчик со свободной осью вращения, который может реагировать на изменение угла тела, в котором он установлен.
Как работает гироскопический пульт: встроенный контроллер позволяет определить положение устройства при перемещении его в пространстве в ту или иную сторону. Датчик получает информацию об изменении положении тела в трех плоскостях, в соответствии с этим, выполняет расчет угла наклона. На основании данных, полученных от контроллера-гироскопа, курсор перемещается по экрану.
На основании данных, полученных от контроллера-гироскопа, курсор перемещается по экрану.
Как включить гироскоп на пульте
Если в ПДУ предусмотрен режим энергосбережения, гироскопический датчик может отключаться автоматически через определенное время, пока пульт не используется. Это позволяет предотвратить трату энергии батареек и исключить их преждевременный разряд. Как включить гироскоп на пульте в таком случае: достаточно нажать на любую кнопку. ПДУ выйдет из режима ожидания и будет готов к работе.
В некоторых моделях air mouse, к примеру, Fly T2 или G30, предусматриваются отдельные кнопки для включения и отключения гироскопического датчика. Во Fly T2 это специальная клавиша с индикатором в виде вибрирующей мышки. В AirMouse G30 это кнопка красного цвета со значком в виде стрелки и питания. В обоих случаях кратковременное нажатие используется для блокировки и разблокировки датчика.
Если на экране отсутствует курсор, нужно заново привязать пульт к USB-адаптеру.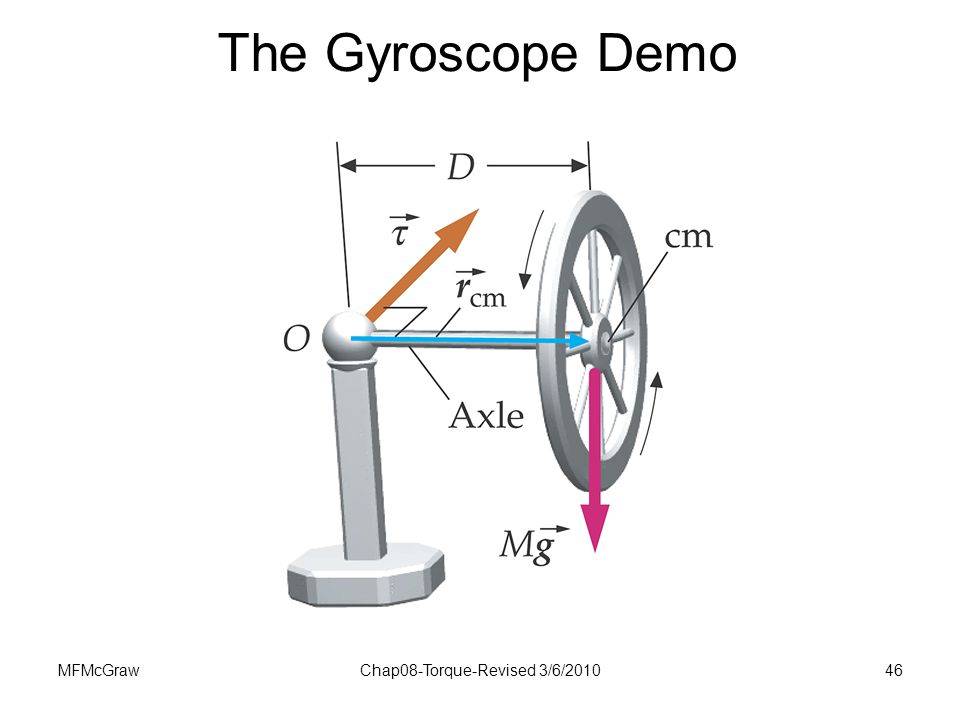 Краткое руководство на примере Fly T2:
Краткое руководство на примере Fly T2:
- Извлеките из ПДУ одну из батареек.
- Отключите USB-адаптер от компьютера, приставки или телевизора.
- Одновременно зажмите две кнопки – «ОК» и «Назад».
- Удерживая клавиши, вставьте источник питания в ПДУ. Кнопки надо удерживать еще не менее 3 сек.
- На гироскопическом пульте начнет мигать индикатор.
- Приемник подключается к USB-разъему приставки или компьютера.
- Пульт кладется на расстоянии 5-20 см от адаптера. В течение последующих 15-20 секунд индикатор отключится.
На этом процедура калибровки завершена. При замене USB-адаптера, в случае утери или поломки, привязка выполняется аналогичным образом.
инструкция, схемы и примеры использования [Амперка / Вики]
Используйте гироскоп для определения угловой скорости вокруг собственных осей X, Y, Z.
Модуль пригодиться для стабилизации летательного аппарата по самолётным углам: тангаж, крен и рысканье. Гироскоп совместно с акселерометром применяется для отслеживания угла поворота в современном смартфоне.
Гироскоп совместно с акселерометром применяется для отслеживания угла поворота в современном смартфоне.
Видеообзор
Гироскоп в обзоре IMU-модуля.
Пример работы для Arduino и XOD
В качестве мозга для считывания показаний с датчика рассмотрим платформу из серии Arduino, например, Uno.
На аппаратном уровне инерционный модуль общается с управляющей электроникой по шине I²C. Но не переживайте о битах и байтах: используйте библиотеку TroykaIMU и на выходе получите готовы данные.
Схема устройства
Вывод данных
В качестве примера выведем в Serial-порт угловую скорость вокруг собственных осей X, Y, Z.
- gyro-read-data.ino
// Библиотека для работы с модулями IMU #include <TroykaIMU.h> // Создаём объект для работы с гироскопом Gyroscope gyroscope; void setup() { // Открываем последовательный порт Serial.begin(9600); // Выводим сообщение о начале инициализации Serial. println("Gyroscope begin");
// Инициализируем гироскоп
gyroscope.begin();
// Выводим сообщение об удачной инициализации
Serial.println("Initialization completed");
}
void loop() {
// Выводим угловую скорость в градусах в секунду относительно оси X
Serial.print(gyroscope.readRotationDegX());
Serial.print("\t\t");
// Выводим угловую скорость в градусах в секунду относительно оси Y
Serial.print(gyroscope.readRotationDegY());
Serial.print("\t\t");
// Выводим угловую скорость в градусах в секунду относительно оси Z
Serial.print(gyroscope.readRotationDegZ());
Serial.print("\t\t");
Serial.println();
delay(100);
}
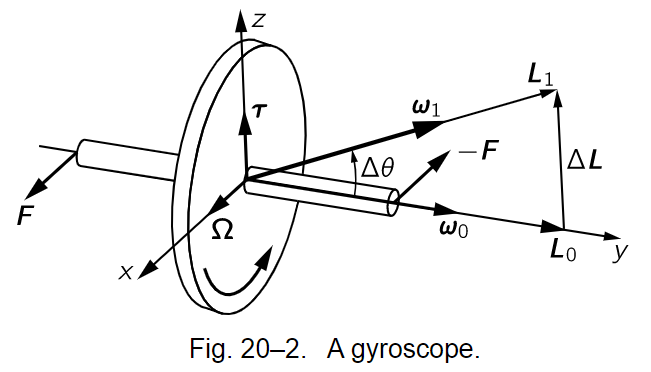 println("Gyroscope begin");
// Инициализируем гироскоп
gyroscope.begin();
// Выводим сообщение об удачной инициализации
Serial.println("Initialization completed");
}
void loop() {
// Выводим угловую скорость в градусах в секунду относительно оси X
Serial.print(gyroscope.readRotationDegX());
Serial.print("\t\t");
// Выводим угловую скорость в градусах в секунду относительно оси Y
Serial.print(gyroscope.readRotationDegY());
Serial.print("\t\t");
// Выводим угловую скорость в градусах в секунду относительно оси Z
Serial.print(gyroscope.readRotationDegZ());
Serial.print("\t\t");
Serial.println();
delay(100);
}
println("Gyroscope begin");
// Инициализируем гироскоп
gyroscope.begin();
// Выводим сообщение об удачной инициализации
Serial.println("Initialization completed");
}
void loop() {
// Выводим угловую скорость в градусах в секунду относительно оси X
Serial.print(gyroscope.readRotationDegX());
Serial.print("\t\t");
// Выводим угловую скорость в градусах в секунду относительно оси Y
Serial.print(gyroscope.readRotationDegY());
Serial.print("\t\t");
// Выводим угловую скорость в градусах в секунду относительно оси Z
Serial.print(gyroscope.readRotationDegZ());
Serial.print("\t\t");
Serial.println();
delay(100);
}Пример для Espruino
В качестве мозга для считывания показаний с датчика рассмотрим платформы из серии Espruino, например, Iskra JS.
Схема устройства
Вывод данных
В качестве примера выведем в консоль угловую скорость гироскопа вокруг собственных осей X, Y, Z.
- gyro-read-data.js
Пример для Raspberry Pi
В качестве мозга для считывания показаний с датчика рассмотрим одноплатные компьютеры Raspberry Pi, например, Raspberry Pi 4.
Схема устройства
Подключите гироскоп к пинам SDA и SCL шины I²C компьютера Raspberry Pi.
Для быстрой сборки и отладки устройства возьмите плату расширения Troyka Cap, которая надевается сверху на малину методом бутерброда.
Программная настройка
Вывод данных
А написать пример кода для Raspberry Pi оставим вам домашним заданием.
Элементы платы
Гироскоп на I3G4250D
Гироскоп выполнен на чипе I3G4250D и представляет собой миниатюрный датчик перемещений в трёхмерном пространстве, разработанный по технологии MEMS от компании STMicroelectronics. Адрес устройства по умолчанию равен 0x68, но может быть изменен на 0x69. Подробности читайте в разделе смена адреса модуля.
Регулятор напряжения
Линейный понижающий регулятор напряжения NCP698SQ33T1G обеспечивает питание MEMS-чипа и других компонентов сенсора. Диапазон входного напряжения от 3,3 до 5 вольт. Выходное напряжение 3,3 В с максимальным выходным током 150 мА.
Преобразователь логических уровней
Преобразователь логических уровней PCA9306DCT необходим для сопряжения датчика с разными напряжениями логических уровней от 3,3 до 5 вольт. Другими словами сенсор совместим как с 3,3 вольтовыми платами, например, Raspberry Pi, так и с 5 вольтовыми — Arduino Uno.
Troyka-контакты
Датчик подключается к управляющей электронике через две группы Troyka-контактов:
Питание (V) — соедините с рабочим напряжением микроконтроллера.
Земля (G) — соедините с землёй микроконтроллера.
Сигнальный (D) — пин данных шины I²C. Подключите к пину SDA микроконтроллера.
Сигнальный (C) — пин тактирования шины I²C.
Подключите к пину SCL микроконтроллера.
 Подключите к пину SCL микроконтроллера.
Подключите к пину SCL микроконтроллера.Смена адреса модуля
Иногда в проекте необходимо использовать несколько гироскопов. Для этого на модуле предусмотрены контактная площадка. Для смена адреса капните каплей припоя на отведённую контактную площадку.
| Модуль | Адрес без перемычки | Адрес с перемычкой |
|---|---|---|
| Гироскоп | 0x68 | 0x69 |
Принципиальная и монтажная схемы
Габаритный чертёж
Характеристики
MEMS-датчик: гироскоп I3G4250D
Интерфейс: I²C
I²C-адрес:
Максимальная чувствительность: 8,7×10-3 °/с
Диапазон измерений: ±250 / ±500 / ±2000 °/с²
Напряжение питания: 3,3–5 В
Потребляемый ток: до 10 мА
Размеры: 25,4×25,4×10,1 мм
Ресурсы
Оригинальный Механический Гироскоп в коробке Tedco
Обзор оригинального Механического Гироскопа в коробке от Tedco
Компания Гироскоп TEDCO много лет производит гироскопы для промышленности, оборонки, картографии, кинематографа, навигационных систем летательных аппаратов и смартфонов. Уменьшенные копии балансировочных систем поставляются в школы и магазины игрушек: школьники должны понимать механизм устойчивости предмета, вращающегося вокруг оси. Трещина не должна вас пугать: покупка не бракована, щель необходима для увеличения устойчивости.
Уменьшенные копии балансировочных систем поставляются в школы и магазины игрушек: школьники должны понимать механизм устойчивости предмета, вращающегося вокруг оси. Трещина не должна вас пугать: покупка не бракована, щель необходима для увеличения устойчивости.
Достоинство игрушки:
- Наглядность на уроках физики и механики.
- Качественные материалы – сталь и волокна веревки.
- Простор для экспериментов с балансом.
Для кого?
Детям до восьми лет опыты с вращающимся прибором проводить не рекомендуется: дошкольнику неинтересны гироскопические силы. Но если «почемучка» заинтересуется устройством юлы или волчка – смело покупайте набор с двумя приборами и подставками для них.
Где играть?
Во избежание разбалансировки гироскопов не рекомендуются опыты на природе. Для экспериментов существуют кабинеты физики и кружка юного техника.
Как запускать?
Чтобы проводить «ньютоновские опыты» с гироскопом – соблюдайте алгоритм:
-
Крепко возьмите прибор в руку.
- Проденьте нитку в отверстие на роторной оси.
- Намотайте нить на ось игрушки, чтобы потом размотать ее.
- Убедитесь, что нитка намотана крепко и не ослаблено, без зазоров, между ротором и центральной частью оси.
- Чем сильнее вы дерните за свободный кончик нити – тем сильнее раскрутится аппарат.
- Установите гироскоп на гироскоп, создавая сложную конструкцию.
Объясните ребенку, что на прибор действуют гравитационные и гироскопические силы. Поэтому модель не падает с платформы, пьедестала, конца линейки, грифеля карандаша. Чтобы игрушка долгие годы радовала и впечатляла вас, изредка смазывайте маслами концы роторной оси.
Характеристики:
- Для возрастов 8+
Код производителя: tc00100
Характеристики Оригинальный Механический Гироскоп в коробке Tedco
| Вес | 1. 28 28 |
| Тип | Научные наборы и опыты |
| Производитель | TEDCO |
| Наука: | Физика |
Гарантия на Оригинальный Механический Гироскоп в коробке Tedco
90 дней на радиоупавляемые модели и электронные игрушки (гарантия на электронику).
90 дней на другие игрушки.
Отзывы и вопросы о товаре
Друзья, доброго дня. Получил ваш гироскоп на днях. Меня не много смущает звук его работы, заметное биение и вибрация, от этого и не такое большое время вращения. Мне казалось что тедко — это самый качественный и совершенный в этом плане и должен быть гораздо "глаже". Может быть мне бракованный попался? Не точный и разбалансированный? Может быть такое?
ОтветитьОтвет магазина
Добрый день, Денис! После покупки модели для улучшения балансирования рекомендуется смазывать модель.
Все работает, но сделан топорно. Видны места сварки (черные пятна) краска лежит не равномерно, больше похоже на Китай, а не на оригинальный США
ОтветитьОтвет магазина
Добрый день. Александр! Компания Tedco к которой принадлежит данный гироскоп находится непосредственно в Америке. У них нет представительств в Китае.
Рекомендую слегка смазывать две точки трения на оси, плавнее работает
ОтветитьМинимальное время доставки в Оренбург?
ОтветитьОтвет магазина
Добрый день, Ринат! Минимальный срок доставки 4 дня.
Добрый вечер! Подскажите сколько будет стоить данный товар с доставкой в г. Наро-Фоминск?
ОтветитьОтвет магазина
Добрый день, Александр! Стоимость доставки составит 471 рубль.
Из какого материала изготовлен гироскоп?
ОтветитьОтвет магазина
Добрый день! Данная модель производится в США и изготавливается из ударопрочного металла.
Дмитрий Клыков
У меня в детстве была игрушка на основе гироскопа. Он был массивнее, да и материалы покрепче (сталь). Но с тех пор не сохранился. Я хотел такую же штуку, а получил плохенькую поделку за дорогую цену. Мне просто нужно было сделать демонстрацию на уроке, что кое-как удалось, но не очень качественно.
ОтветитьКак работают гироскопы | HowStuffWorks
Почему гироскоп должен отображать такое поведение? Совершенно бессмысленно, что ось велосипедного колеса может вот так висеть в воздухе. Однако если вы подумаете о том, что на самом деле происходит с различными секциями гироскопа при его вращении, вы увидите, что это поведение совершенно нормально!
Давайте посмотрим на две маленькие секции гироскопа, когда он вращается — верхнюю и нижнюю, например:
Когда сила приложена к оси, секция в верхней части гироскопа будет пытаться переместиться в влево, а секция внизу гироскопа попытается сместиться вправо, как показано. Если гироскоп не вращается, то колесо перевернется, как показано в видео на предыдущей странице. Если гироскоп вращается, подумайте, что происходит с этими двумя секциями гироскопа: Первый закон движения Ньютона гласит, что движущееся тело продолжает двигаться с постоянной скоростью по прямой, если на него не действует неуравновешенная сила. Таким образом, на верхнюю точку гироскопа действует сила, приложенная к оси, и она начинает двигаться влево. Он продолжает попытки двигаться влево из-за первого закона движения Ньютона, но вращение гироскопа вращает его, как это:
Если гироскоп не вращается, то колесо перевернется, как показано в видео на предыдущей странице. Если гироскоп вращается, подумайте, что происходит с этими двумя секциями гироскопа: Первый закон движения Ньютона гласит, что движущееся тело продолжает двигаться с постоянной скоростью по прямой, если на него не действует неуравновешенная сила. Таким образом, на верхнюю точку гироскопа действует сила, приложенная к оси, и она начинает двигаться влево. Он продолжает попытки двигаться влево из-за первого закона движения Ньютона, но вращение гироскопа вращает его, как это:
Этот эффект является причиной прецессии.Различные секции гироскопа получают силы в одной точке, но затем поворачиваются в новое положение! Когда верхняя часть гироскопа поворачивается на 90 градусов в сторону, он продолжает двигаться влево. То же самое и с нижней частью — она поворачивается на 90 градусов в сторону и продолжает стремиться двигаться вправо. Эти силы вращают колесо в направлении прецессии. Поскольку идентифицированные точки продолжают поворачиваться еще на 90 градусов, их первоначальные движения отменяются.Таким образом, ось гироскопа зависает в воздухе и прецессирует. Если вы посмотрите на это с этой точки зрения, то увидите, что прецессия вовсе не таинственна — она полностью соответствует законам физики!
Поскольку идентифицированные точки продолжают поворачиваться еще на 90 градусов, их первоначальные движения отменяются.Таким образом, ось гироскопа зависает в воздухе и прецессирует. Если вы посмотрите на это с этой точки зрения, то увидите, что прецессия вовсе не таинственна — она полностью соответствует законам физики!
Что это такое, как они работают и их значение
На первый взгляд гироскопы — довольно странные объекты. Они двигаются особым образом и, кажется, бросают вызов гравитации. Особые свойства этих устройств сделали их бесценным активом в самолетах, космических станциях и множестве других технологий, связанных с вращением.
Типичный самолет часто имеет целый набор таких устройств, включая важнейший компас. Космическая станция «Мир» фактически использовала 11 из них для ориентации относительно Солнца, и у телескопа Хаббла их тоже есть.
Источник : Rina / FlickrЧто такое гироскоп?
Согласно English Oxford Dictionary, гироскоп — это «устройство, состоящее из колеса или диска, установленного так, что он может быстро вращаться вокруг оси, которая сама может свободно менять направление. На ориентацию оси не влияет наклон крепления ».
На ориентацию оси не влияет наклон крепления ».
Хотя это определение великолепно, оно на самом деле не объясняет, как они работают или почему они так важны (при условии, что мы немного урезали определение) Чтобы лучше понять это, нам сначала нужно взглянуть на их «странное поведение».
Профессиональные хитрости
Гироскопы, в их самой основной форме, представляют собой вращающееся колесо или диск на оси. Более сложные образцы также будут установлены на металлической раме или на наборе подвижных или неподвижных рам (или карданов) для повышения точности устройства.
Хотя на поверхности они кажутся простыми объектами, они могут выполнять очень странные трюки.
Когда колесо не вращается, гироскопы фактически представляют собой чрезмерно сконструированные пресс-папье. Если вы попытаетесь встать, он просто упадет (очевидно). Ключ к ним — в их вращении.
Источник : Гордон Джоли / Flickr Возможно, вы играли с гироскопами в детстве? Может у вас есть спиннер непоседа? Если да, то вы вспомните, как они могут выполнять множество интересных трюков. Например, вы можете балансировать на веревке или пальце во время движения.
Например, вы можете балансировать на веревке или пальце во время движения.
Еще одно примечательное их свойство, если вы когда-либо держали его в руках, — это то, что он будет пытаться сопротивляться попыткам сдвинуть свою позицию.
Вы даже можете наклонить его под углом, когда он подвешен на подставке, и он будет левитировать, хотя и вращается вокруг подставки. Еще более впечатляюще то, что вы можете поднять гироскоп с помощью веревки на одном конце.
Как работают гироскопы?
Объяснение этого явления сложно понять интуитивно.Их способность, казалось бы, игнорировать гравитацию, является продуктом углового момента, на который влияет крутящий момент на диске, как и сила тяжести, для создания гироскопической прецессии вращающегося диска или колеса.
Источник: Берни Эммонс / Flickr Это явление также известно как гироскопическое движение или гироскопическая сила, и оно действительно оказалось очень полезным для нас, людей. Эти термины относятся к тенденции вращающегося объекта, а не только гироскопа, сохранять ориентацию своего вращения.
Эти термины относятся к тенденции вращающегося объекта, а не только гироскопа, сохранять ориентацию своего вращения.
Таким образом, вращающийся объект обладает угловым моментом, как упоминалось ранее, и его необходимо сохранять. Из-за этого вращающийся объект будет сопротивляться любому изменению своей оси вращения, так как изменение ориентации приведет к изменению углового момента.
Другой замечательный пример прецессии происходит и с планетой Земля. Как вы знаете, ось вращения Земли на самом деле лежит под углом к вертикали, которая из-за своего угла образует круг, когда сама ось вращения вращается.
Хотя это не совсем относится к этой статье, причина странного наклона Земли на самом деле довольно интересна.
Этот эффект тем сильнее, чем быстрее вращается диск или колесо, как предсказывает Второй закон Ньютона. Это кажется очевидным любому, кто имеет базовые знания физики.
Основная причина, по которой они, кажется, бросают вызов гравитации, — это эффективный крутящий момент, приложенный к вращающемуся диску, который влияет на его вектор углового момента.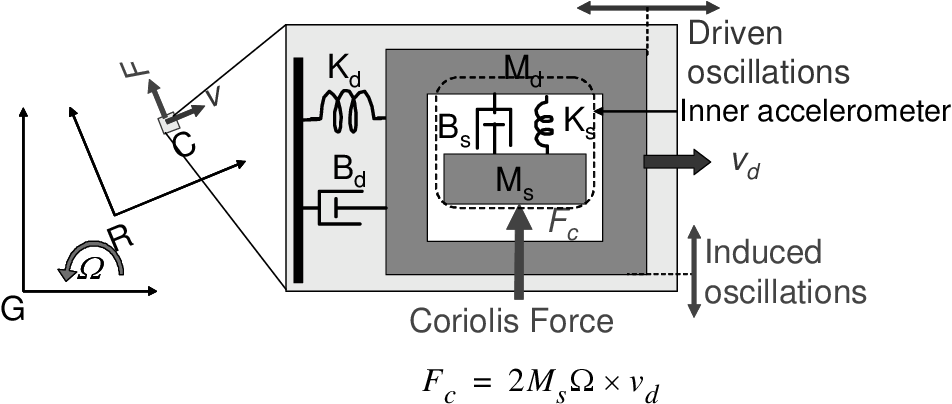 Влияние силы тяжести на плоскость вращающегося диска заставляет ось вращения «отклоняться».
Влияние силы тяжести на плоскость вращающегося диска заставляет ось вращения «отклоняться».
В результате вся ось вращения находит «золотую середину» между влиянием гравитации и собственным вектором углового момента. Теперь помните, что гироскоп не может упасть к центру тяжести из-за чего-то мешающего — например, вашей руки, рамы / стабилизатора или стола.
Теперь, если принять во внимание тот факт, что гироскоп останавливается от падения к центру тяжести из-за чего-то на пути, мы получаем удивительные свойства, которые мы видим в этих устройствах.
Картинка — ну видео — стоит тысячи слов, поэтому мы делегируем более подробное объяснение следующему видео:
Гироскоп и акселерометр: в чем разница между ними?
Чтобы полностью ответить на этот вопрос, нам нужно оценить, как работает каждое устройство. Поскольку мы уже подробно рассмотрели гироскоп выше, давайте посмотрим, что такое акселерометр и как он работает.
В словаре Merriam Webster акселерометр определяется как «инструмент для измерения ускорения или для обнаружения и измерения вибраций.»
Отлично, но это не дает нам много информации. Акселерометры, в их самом основном смысле, представляют собой электромеханические устройства, которые измеряют силы ускорения — отсюда и название.
Эти силы могут быть статическими (например, сила тяжести) или динамический (вызванный движением или вибрацией устройства). Существуют различные способы изготовления акселерометра, в большинстве случаев использующие пьезоэлектрический эффект или чувствительную емкость. напряжение взамен.В последнем используются две микроструктуры, расположенные рядом друг с другом.
Каждая из них имеет определенную емкость, и по мере того, как ускоряющие силы перемещают одну из структур, ее емкость будет изменяться. Добавив схему для преобразования емкости в напряжение, вы получите очень полезный маленький акселерометр.
Есть еще несколько методов, включая использование пьезорезистивного эффекта, пузырьков горячего воздуха и света, и это лишь некоторые из них. Итак, как видите, акселерометры и гироскопы действительно очень разные звери.
По сути, основное различие между ними состоит в том, что один может определять вращение, а другой — нет. Поскольку гироскопы работают по принципу углового момента, они идеально подходят для определения ориентации объекта в пространстве.
Акселерометры, с другой стороны, могут измерять только линейное ускорение на основе вибрации.
Однако есть некоторые варианты акселерометра, которые также включают гироскоп. Эти устройства состоят из гироскопа с грузом на одной из осей.
Устройство будет реагировать на силу, создаваемую весом, когда оно ускоряется, интегрируя эту силу для создания скорости.
Что такое оптические гироскопы?
Другой вид гироскопа — оптический гироскоп. Это устройство не имеет движущихся частей и обычно используется в современных коммерческих авиалайнерах, ракетах-носителях и орбитальных спутниках.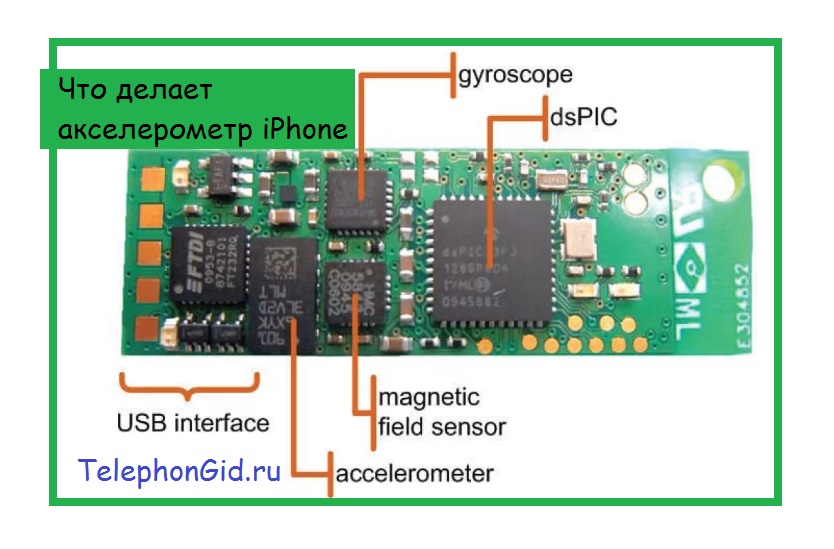
Используя преимущества эффекта Саньяка, эти устройства используют лучи света для обеспечения аналогичной функции механических гироскопов.Эффект был впервые продемонстрирован в 1911 году Францем Харрисом, но именно французский ученый Жорж Саньяк правильно определил причину.
Если луч света разделяется и направляется в двух противоположных направлениях по замкнутому пути на вращающейся платформе с зеркалами по периметру, а затем лучи рекомбинируются, они проявляют интерференционные эффекты. В 1913 году Саньяк пришел к выводу, что свет распространяется со скоростью, не зависящей от скорости источника.
Он также обнаружил, что, несмотря на то, что оба луча находятся внутри замкнутого контура, луч, движущийся в одном направлении вращения, прибыл в свою начальную точку немного позже, чем другой.
Согласно Британской энциклопедии, «в результате была обнаружена картина« интерференционных полос »(чередование светлых и темных полос), которая зависела от точной скорости вращения поворотного стола».
Правило правой руки
Ученые склонны использовать так называемое «правило правой руки», чтобы визуализировать это.
Для этого возьмите правую руку и сделайте прямой угол. Затем можно растянуть пальцы по радиусу колеса.
Если вы согнете кончики пальцев в направлении вращения, ваш большой палец будет указывать в направлении углового момента.По сути, ось колеса будет направлением, в котором все вращающееся колесо «хочет» двигаться.
Источник: остановите голубя! / FlickrЭто видео дает нам довольно простое объяснение использования подвешенного велосипедного колеса.
Применение гироскопов
Интересные свойства гироскопов предоставили ученым и инженерам несколько увлекательных приложений. Их способность сохранять определенную ориентацию в пространстве является фантастической для некоторых приложений.
Наденьте сенсоры, и вы получите рецепт полезности. Имея это в виду, вот несколько отличных примеров использования гироскопов в нашем современном мире.
1. В самолетах вы найдете множество гироскопов.
Источник: Алекс Бельтюков / Wikimedia CommonsВ современных самолетах инерционные системы наведения хорошо используют эти относительно простые устройства. У них есть набор вращающихся гироскопов для отслеживания и управления ориентацией самолета в полете. Вращающиеся гироскопы содержатся в специальных отсеках, которые позволяют им сохранять свою ориентацию независимо от ориентации самолета.
Клетки гироскопа имеют электрические контакты и датчики, которые могут передавать информацию пилоту, когда самолет катится или наклоняется. Это позволяет пилоту и системам наведения «знать» текущую относительную ориентацию самолета в пространстве.
2. Марсоход имеет пару гироскопов.
Марсоход также имеет набор гироскопов. Они обеспечивают устойчивость марсохода, а также помогают в навигации. Они также применяются в самолетах-дронах и вертолетах для обеспечения устойчивости и помощи в навигации.
3. В крылатых и баллистических ракетах также используются гироскопы.
Источник: Per-Olof Forsberg / FlickrЕще одно интересное применение гироскопов — это системы наведения крылатых и баллистических ракет. Используемые для автоматического управления и коррекции крена, тангажа и рысканья, датчики гироскопов использовались для этой цели со времен немецких ракет Фау-1 и Фау-2 времен Второй мировой войны.
Как правило, ракеты для этого оснащены как минимум двумя гироскопами цель, с каждым гироскопом, обеспечивающим фиксированную опорную линию, от которой могут быть вычислены любые отклонения.Одна ссылка обычно включает ось вращения вертикального гироскопа.
От этой оси можно легко измерить отклонения по тангажу, крену и рысканью. Гироскопы также нашли применение в стабилизаторах прицелов, бомбовых прицелах и платформах для переноски орудий и радиолокационных систем на борту военных кораблей.
4. Гироскопы также можно найти в орбитальных космических аппаратах
Еще одно интересное применение гироскопов — это инерциальные системы наведения орбитальных космических аппаратов. Такое маленькое судно требует высокой точности, когда дело доходит до стабилизации, и гироскопы в значительной степени идеально подходят для этой работы.
Есть несколько более крупных и тяжелых устройств, называемых импульсными колесами или реактивными колесами, которые также используются для контроля высоты некоторых более крупных спутников.
5. Часть «Звездных войн: Возвращение джедая» была снята с помощью гироскопов. Джедаи
(как и во многих других фильмах). Это устройство, используемое в сочетании с несколькими гироскопами, удерживало камеру стабильно при съемке фоновых снимков для знаменитой погони на спидер-байке на Эндоре.Изобретенный Гарретом Брауном, он управлял установкой, чтобы пройти через лес из красного дерева, управляя камерой со скоростью один кадр в секунду . Когда отснятый материал был ускорен до 24 кадра в секунду до , это создавало впечатление скоростного путешествия сквозь деревья.
Сегодня потомки Steadicam — обычная черта многих кинопроизводств.
6. В вашем телефоне тоже может быть один
Гироскопы также нашли применение в различных потребительских товарах за последние несколько лет.Включение их в карманные устройства, такие как смартфоны, позволяет с высокой точностью определять движение в трехмерном пространстве.
Гироскопы обычно сочетаются с акселерометрами в современных смартфонах, чтобы обеспечить превосходное определение направления и движения. Известные примеры включают Samsung Galaxy Note 4, HTC Titan, iPhone 5s и т. Д.
Современные игровые консоли также имеют тенденцию включать в себя гироскоп в той или иной форме. Гироскопы — от пульта Wii до различных периферийных устройств для Playstation 3 и 4 — открыли совершенно новый способ играть в компьютерные игры.
7. Чтобы мы не забыли дроны
Источник: PexelsЕще одно интересное применение гироскопов в нашей повседневной жизни — это дроны. Для того, чтобы эти устройства могли идеально летать, им необходимы гироскопы, среди прочего, чтобы они могли парить и летать по уровню.
В современных коммерческих беспилотных летательных аппаратах обычно используются трех- и шестиосные гироскопические стабилизаторы для предоставления навигационной информации контроллеру полета, что упрощает и повышает безопасность полета дронов.
И это все, ребята.
Несмотря на простоту конструкции, они стали незаменимыми элементами комплекта для чего угодно, от океанских кораблей до космических шаттлов и, конечно же, вертолетов.
В целом гироскопы просто невероятны, даже если вы не подозреваете, что они там есть. Удивительно, что такое простое устройство может иметь такие интересные и разнообразные приложения.
Хотя устройства относительно просты, они обладают фантастическими свойствами, которые ученые и инженеры использовали, чтобы сделать наш мир немного лучше.
Если эта статья пробудила ваше воображение и вы хотите иметь собственный гироскоп, есть множество интернет-магазинов, из которых можно выбрать. Как ты мог отказаться?
Гироскоп — learn.sparkfun.com
Что такое гироскоп
Гироскопы или гироскопы — это устройства, которые измеряют или поддерживают вращательное движение. Гироскопы MEMS (микроэлектромеханические системы) — это небольшие недорогие датчики, измеряющие угловую скорость. Единицы угловой скорости измеряются в градусах в секунду (° / с) или оборотах в секунду (RPS).Угловая скорость — это просто измерение скорости вращения.
Гироскоп LPY503 на коммутационной плате. Гироскопы, аналогичные приведенному выше, могут использоваться для определения ориентации и используются в большинстве автономных навигационных систем. Например, если вы хотите сбалансировать робота, можно использовать гироскоп для измерения вращения из сбалансированного положения и отправки поправок на двигатель.
Основные понятия в этом руководстве
Перед тем, как погрузиться в это руководство, вы можете прочитать некоторые из этих концепций, если вы с ними не знакомы.
Как работает гироскоп
Когда вещи вращаются вокруг оси, они имеют так называемую угловую скорость . Вращающееся колесо можно измерять в оборотах в секунду (RPS) или градусах в секунду (° / s).
Обратите внимание, что ось z гироскопа ниже совмещена с осью вращения колеса.
Если вы прикрепите датчик к колесу, показанному выше, вы можете измерить угловую скорость оси z гироскопа. Две другие оси не будут измерять вращение.
Представьте, если колесо вращается раз в секунду. У него будет угловая скорость 360 градусов в секунду. Также важно направление вращения колеса. По часовой стрелке вокруг оси или против часовой стрелки?
Трехосный гироскоп MEMS, подобный изображенному выше (ITG-3200), может измерять вращение вокруг трех осей: x, y и z. Некоторые гироскопы бывают одноосных и двухосных, но трехосный гироскоп в одном чипе становится меньше, дешевле и популярнее.
Гироскопычасто используются на объектах, которые совсем не вращаются очень быстро. Самолеты (надеюсь) не крутятся. Вместо этого они поворачиваются на несколько градусов по каждой оси. Обнаруживая эти небольшие изменения, гироскопы помогают стабилизировать полет самолета. Также обратите внимание, что ускорение или линейная скорость самолета не влияет на измерения гироскопа. Гироскопы измеряют только угловую скорость.
Как гироскоп MEMS определяет угловую скорость?
Внутренний вид гироскопического датчика MEMS
Датчик гироскопа в МЭМС крошечный (от 1 до 100 микрометров, размером с человеческий волос).Когда гироскоп вращается, небольшая резонирующая масса смещается при изменении угловой скорости. Это движение преобразуется в электрические сигналы очень слабого тока, которые могут усиливаться и считываться микроконтроллером хоста.
Как подключиться к гироскопу
Основными аппаратными соединениями для использования гироскопа являются power и интерфейс связи . Как всегда, обратитесь к таблице данных датчика за всей информацией о технических характеристиках и примерах соединений.
Интерфейс связи
Гироскопымогут иметь цифровой интерфейс или аналоговый .
Гироскопы с цифровым интерфейсом обычно используют протоколы связи SPI или I2C. Использование этих интерфейсов позволяет легко подключиться к микроконтроллеру хоста. Одним из ограничений цифрового интерфейса является максимальная частота дискретизации. I2C имеет максимальную частоту дискретизации 400 Гц. С другой стороны, SPI может иметь гораздо более высокую частоту дискретизации.
Гироскопы с аналоговым интерфейсом представляют скорость вращения посредством переменного напряжения, обычно между землей и напряжением питания. Для считывания сигнала можно использовать АЦП на микроконтроллере. Аналоговые гироскопы могут быть менее дорогими, а иногда и более точными, в зависимости от того, как вы читаете аналоговый сигнал.
Мощность
ГироскопыMEMS — это, как правило, устройства с низким энергопотреблением. Рабочие токи находятся в диапазоне мА, а иногда и мкА.Напряжение питания для гироскопов обычно составляет 5 В или меньше. Цифровые гироскопы могут иметь выбираемые логические напряжения или работать от напряжения питания. Для любого цифрового интерфейса не забудьте подключить линии от 5 до 5 В и от 3,3 до 3,3 В. Кроме того, гироскопы с цифровыми интерфейсами могут иметь режимы пониженного энергопотребления и сна, что позволяет использовать их в приложениях с батарейным питанием. Иногда это преимущество перед аналоговым гироскопом.
Как выбрать гироскоп
При выборе гироскопа необходимо учитывать множество спецификаций.Вот несколько наиболее важных полезных:
Диапазон
Диапазон измерения или диапазон полной шкалы — это максимальная угловая скорость, которую может прочитать гироскоп. Подумайте о том, что вы измеряете. Вам нужно измерить вращение проигрывателя, которое работает очень медленно, или вращающегося колеса, которое может быть очень быстрым?
Чувствительность
Чувствительность измеряется в мВ на градус в секунду (мВ / ° / с). Не позволяйте странному измерению этой ценности пугать вас.Он определяет, насколько изменяется напряжение при заданной угловой скорости. Например, если гироскоп указан с чувствительностью 30 мВ / ° / с, и вы видите изменение выходного сигнала на 300 мВ, вы повернули гироскоп со скоростью 10 ° / с.
Хорошее правило, которое следует запомнить: по мере увеличения чувствительности дальность действия уменьшается. Например, посмотрите на лист данных гироскопа LPY503 или любой гироскоп с выбираемым диапазоном:
Обратите внимание, что с большим диапазоном страдает чувствительность и вы получаете меньшее разрешение.
Смещение
Как и в случае с любым другим датчиком, измеряемые вами значения будут содержать некоторую погрешность или смещение. Вы можете увидеть смещение гироскопа, измерив выходной сигнал, когда гироскоп неподвижен. Хотя вы думаете, что видите 0 °, когда гироскоп неподвижен, вы всегда будете видеть небольшую ненулевую ошибку на выходе. Эти ошибки иногда называют дрейфом смещения или нестабильностью смещения. На смещение сильно влияет температура сенсора. Чтобы свести к минимуму источник этой ошибки, большинство гироскопов имеют встроенный датчик температуры.Таким образом, вы можете считывать температуру датчика и исправлять любые изменения, зависящие от температуры. Чтобы исправить эти ошибки, гироскоп должен быть откалиброван. Обычно это делается, удерживая гироскоп неподвижным и обнуляя все показания в вашем коде.
Идем дальше
К настоящему времени вы должны знать, как работает гироскоп, и иметь хорошую основу, чтобы начать работу с гироскопом в своем собственном проекте.
Ознакомьтесь с этими руководствами, в которых используются гироскопы:
гироскопических датчиков — как они работают и что ждет впереди | о гироскопическом датчике | Техническая информация | Другая информация
Гироскопические датчики
Гироскопические датчики, также известные как датчики угловой скорости или датчики угловой скорости, представляют собой устройства, измеряющие угловую скорость.
| Угловая скорость |
|---|
| Проще говоря, угловая скорость — это изменение угла поворота в единицу времени. Угловая скорость обычно выражается в градусах в секунду (градусы в секунду). |
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Видео: серия XV7000 для РВК 、 АГВ
Типы гироскопических датчиков
Гироскопические датчикибывают разных типов.Здесь представлены разные типы по размеру и производительности.
В последние годы гироскопические датчики вибрации нашли свое применение, среди прочего, в системах обнаружения дрожания камеры для компактных видео- и фотоаппаратов, в датчиках движения для видеоигр и в системах электронного контроля устойчивости (противоскольжения) транспортных средств.
Ожидается, что в будущем спрос на гироскопы вибрации будет расти в таких областях, как системы безопасности и поддержки водителя транспортных средств, а также управление движением роботов.
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Гироскопические датчики вибрации
Вибрационные гироскопические датчики определяют угловую скорость по силе Кориолиса, приложенной к вибрирующему элементу. По этой причине точность измерения угловой скорости существенно различается в зависимости от материала элемента и конструктивных отличий. Здесь мы кратко опишем основные типы элементов, используемых в вибрационных гироскопических датчиках.
Типы элементов, применяемых в вибрационных гироскопических датчиках
Производители гироскопических датчиков вибрации используют различные материалы и конструкции, чтобы разработать компактные, высокоточные гироскопические датчики с хорошими характеристиками, в том числе:
• масштабный коэффициент
• температурно-частотный коэффициент
• компактный размер
• ударопрочность
• стабильность
• шумовые характеристики
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Как работает определение угловой скорости (в датчиках вибрационного гироскопа)
Вибрационные гироскопические датчики определяют угловую скорость по силе Кориолиса, приложенной к вибрирующему объекту.
Здесь мы объясним, как это работает, на примере кристаллического элемента Epson с двойной Т-структурой.
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Применение гироскопического датчика
Гиродатчики имеют три основных применения.
| Измерение угловой скорости |
|---|
| Определите величину создаваемой угловой скорости. Используется для измерения самой величины движения. Пример) Проверка спортивных движений |
| Определение угла |
|---|
| Определяет угловую скорость, создаваемую собственным движением датчика. Углы обнаруживаются процессором посредством операций интеграции. Перемещенный угол передается в приложение и отражается в нем. Бывший.) Автомобильные навигационные системы Игровые контроллеры Сотовая связь |
| Механизмы управления |
|---|
| Определяет вибрацию, вызванную внешними факторами, и передает данные о вибрации в виде электрических сигналов на ЦП. Используется для корректировки ориентации или баланса объекта. Пример) Коррекция дрожания камеры Управление автомобилем |
Интересные факты
Примеры угловой скорости в приложениях:
• Автомобильные навигационные системы: ~ 10 град / с
• Управление транспортным средством: ~ 30 град / с
• Коррекция дрожания камеры: ~ 100 град / с
• Игровые контроллеры: ~ 300 град / с
• Ощущение колебаний лучших игроков в гольф: ~ 3000 град / с
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Примеры приложений
Гироскопические датчики используются во всех изделиях, которые нас окружают.
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Видео: серия XV7000 для РВК 、 АГВ
Как работают гироскопы | Академия роботов
Последним компонентом блока измерения инерции являются датчики, измеряющие угловую скорость, обычно называемые гироскопами. Возможно, в детстве у вас был гироскоп в качестве игрушки, и трудно понять взаимосвязь между этим игрушечным гироскопом, который может балансировать на конце карандаша, с устройством, которое может измерять угловую скорость.Чтобы понять, как можно использовать гироскоп в качестве датчика угловой скорости, нам нужно вернуться к основам вращающихся тел. Здесь у нас есть диск, который вращается вокруг оси, показанной пунктирной линией, и он вращается с угловой скоростью omega g, а диск имеет инерцию вращения j. Мы ссылаемся на угловой момент этого диска и обозначаем его символом h. h в j раз больше омега g. Теперь представим, что я прилагаю крутящий момент к этому вращающемуся диску. Если я это сделаю, диск захочет вращаться вокруг оси, показанной синей стрелкой.Это кросс-произведение вектора h и вектора Tau.
У нас есть гироскоп, и на данный момент устройство не вращается, мы видим, что он очень свободно и красиво движется внутри своего карданного механизма. Если я включаю мотор, требуется немного времени, чтобы набрать скорость, теперь он ведет себя совсем по-другому.
Теперь я собираюсь повернуть узел вращающегося диска вокруг синей стрелки, а теперь; вращающийся диск будет создавать крутящий момент вокруг красной стрелки, и этот крутящий момент является перекрестным произведением векторов омега и h.Итак, как мне измерить крутящий момент? Если ось диска поддерживается двумя подшипниками, то этот крутящий момент будет оказывать давление вверх на один подшипник и вниз на другой подшипник, и эти силы можно измерить. Затем вращающийся диск преобразует омега угловой скорости в крутящий момент, который затем измеряется с помощью датчиков силы.
Важно отметить, что если я потяну за эту ось гироскопа с помощью резиновой ленты, я фактически приложу к ней силу. Итак, я тяну в этом направлении. Вы увидите, что гироскоп пытается вращаться вокруг такой оси.
Датчики угловой скорости на основе вращающихся дисков уже не очень распространены. Они имеют тенденцию быть довольно громоздкими и требуют много энергии для вращения диска. Датчики сегодня основаны на вибрации, а не на вращающемся элементе, но мы по-прежнему склонны называть их гироскопами или гироскопическими датчиками. Вибрирующие элементы изготавливаются по технологии «MEMS». Таким образом, сами чувствительные элементы микроскопические по размеру, но принцип тот же. Угловая скорость в датчике вызывает приложения сил или крутящих моментов к элементам микромасштаба, что приводит к смещениям, которые можно измерить и усилить для получения сигнала угловой скорости.Как и в случае с акселерометрами и магнитометрами, очень часто три датчика гироскопа помещаются в один чип, и они снова располагаются ортогонально, так что они измеряют три компонента вектора угловой скорости. Точно так же, как у вас есть акселерометры в вашей голове, у вас также есть гироскопы в вашей голове, и, опять же, они находятся во внутреннем ухе. В частности, три очень отличительных элемента, известные как полукруглые каналы. Это очень тонкие трубки, наполненные жидкостью, и вращательное движение вашей головы заставляет жидкость в этих трубках двигаться.Движение жидкости обнаруживается крошечными волосковыми клетками внутри каналов, и это приводит к сигналу угловой скорости в ваш мозг. Сигнал угловой скорости сочетается с информацией о движении, поступающей от ваших глаз. Если эти два сигнала несовместимы, это приводит к проблеме, которую мы ощущаем как укачивание, когда наше внутреннее ухо говорит нам, что наше тело движется в одном направлении, но наши глаза говорят нам, что наше тело движется в другом направлении. способ. Итак, это укачивание или морская болезнь, и наше тело довольно нелогично реагирует, желая, чтобы нас рвало.
Что такое гироскопы и как гироскопы работают?
Гироскопы используются для расчета и управления положением тела относительно тела. базовая плоскость в трехмерном пространстве. Ниже приведены приложения гироскопа в различных отраслях промышленности:
1. Навигационные компасы
Механические гироскопические компасы широко используются на больших кораблях для определения фактического положения на север. Гирокомпас определяет направление на север, учитывая ось вращения Земли.А ферромагнитные материалы не влияют на их функцию. Поэтому гирокомпасы более точные и надежные, чем магнитные.
2. Помощь в обеспечении устойчивости
Механические гироскопы могут стабилизировать большие свободно движущиеся тела с помощью гироскопических сил. Например, гироскопы помогают стабилизировать
- Самолеты во время турбулентности
- Самоходные велосипеды.
- Большие здания
- Ховерборд (самобалансирующийся самокат)
- Поддерживайте равновесие большого корабля во время грозы.
3. В локализации
Гироскопы MEMS с другими датчиками (GPS, датчик давления и акселерометр) используются для определения фактического положения и ориентации твердого тела в свободном пространстве.
4. Определение ориентации продукта
МЭМС-гироскопы используются для определения ориентации тела в свободном пространстве. Например, гироскопические датчики применяются в следующих продуктах:
- Квадрокоптер, самолеты и фактическое положение робота.
- Используется в смартфонах для определения ориентации и поворота смартфона.
- В виртуальной реальности, очки дополненной реальности и другие продукты.
5. В смартфонах
Гироскоп MEMS имеет следующие приложения в смартфонах.
- Когда мы поворачиваем смартфон, видео YouTube также вращается само, если включено автоматическое вращение. Мы достигаем этой функции, потому что гироскопический датчик смартфона передает информацию о вращении смартфона процессору смартфона.Мы не можем получить эту функцию поворота экрана без датчика гироскопа.
- GPS вместе с гироскопом и акселерометром используется в смартфонах для определения точного положения.
- В некоторых играх для смартфонов в качестве датчика управляющего сигнала используется гироскоп.
- Google Fit использует акселерометр вместе с гироскопом для отслеживания действий пользователя.
за четыре
Демонстрация гироскопической прецессии
В начале своей лекции Лэйтуэйт использует викторианскую гироскоп для демонстрации гироскопической прецессии.Прецессия описывает изменение направления оси вращающегося объекта, так что в этом случае изменение оси вращения гироскопа.
Лэйтуэйт вешает гири на викторианском гироскопе, чтобы продемонстрировать прецессию
Схема викторианского гироскопа
используется Лейтвейтом для демонстрации прецессии
Когда вес прибавляется к гироскопу (при вращении ротора) происходит гироскопическая прецессия.Эта прецессия в направлении перпендикулярно направлению действия силы веса. В происходящая прецессия показана на анимации слева который показывает вид сверху на гироскоп во время его прецессии (части в гироскоп, такой как база, для ясности опущены)
Почему делает прецессия происходит?
Груз, подвешенный к гироскопу (обозначен крестик на схеме слева) смещен от центра масс гироскоп и подставка.Именно это противодействие сил вызывает прецессию.
Вид сбоку гироскопа, показывающий смещение сил Видно что до свесить груз с гироскопа все силы действовали через одну и ту же точку (центр масс), там Прецессии в данном случае не было. Из б) это может быть видно, что все силы больше не действуют через одну и ту же точку и смещение на расстояние, d. Пара определяется как система сил с равнодействующим моментом, но не Равнодействующая сила.Следовательно, b) эквивалентно a) с моментом, Q также действующий, где
Вид сбоку на b) с
смещение сил, представленное в виде момента
It можно увидеть, что висит груз гироскопа в позиция, показанная в момент, была введена в систему.
Момент
импульса
из
ротор определяется как где C —
постоянная, заданная по принципу
момент
инерции относительно оси k. Из этой формулы видно
что
направление вектора момента импульса совпадает с направлением
направление вращения ротора.
Использование информация, которая сила смещения может быть представлена как пара и направление вектора момента импульса параллельно к спину прецессирующий гироскоп также можно представить в виде ниже.
Гироскоп
установлен на подставке, поэтому центр ротора является
фиксированная точка, поэтому его можно упростить до
Этот результат является ключевым, вектор момента импульса, ч немного изменится в направлении Q (применяемый пара).
.
The направление пары и спиновых векторов может быть рассчитывается с использованием право правило ручного винта. Отсюда направление прецессии получается с использованием информации что момент количества движения и, следовательно, ось вращения изменяется в направление применяемой пары.
В
отсутствие
прецессии веса не было
было
из-за того, что не было приложенной пары Q и, следовательно, никаких изменений в
момент количества движения, другими словами, ось вращения оставалась неподвижной.
Прецессия из игрушечный гироскоп
Игрушечные гироскопы обеспечивают хороший демонстрация прецессии.В в данном случае пара не прикладывается, а получается пара. тот факт, что центр масс гироскопа не выше точки контакт и, таким образом, сила веса и сила реакции компенсируются.
Смещение силы приводит к прикладной паре Q. Точка гироскопа, которая соприкасается с верхней частью башня остается неподвижной, поэтому здесь и прецессия происходит около этой точки. Направление прецессия зависит от направления вращения ротора.Игрушечные гироскопы легко завладеть большинство магазинов игрушек, так что это можно проверить и изменить направление вращения чтобы увидеть, что происходит с направлением прецессии.Момент вектор импульса, h всегда будет двигаться в направлении применяемый пара.
Демонстрации прецессии
Нутация
Другая нутация движения также может наблюдаться во время прецессии, то есть стационарное движение тел k оси вокруг оси K с постоянным углом между ними, это наблюдается как быстрое колебательное движение
.